 Механізм голки (рис. 11). Механізм голки машини 97-А класу
кривошипно-шатунний. Кривошип 7 закріплений на лівому кінці головного вала 13,
що підтримується в рукаві машини двома кульковими підшипниками. В отворі
кривошипа закріплений палець 6. На палець надіта верхня головка шатуна 8.
У нижню головку цього шатуна вставлений палець поводка 4, через отвір
якого проходить голковід 2, закріплений гвинтом 3. На правий
Механізм голки (рис. 11). Механізм голки машини 97-А класу
кривошипно-шатунний. Кривошип 7 закріплений на лівому кінці головного вала 13,
що підтримується в рукаві машини двома кульковими підшипниками. В отворі
кривошипа закріплений палець 6. На палець надіта верхня головка шатуна 8.
У нижню головку цього шатуна вставлений палець поводка 4, через отвір
якого проходить голковід 2, закріплений гвинтом 3. На правий
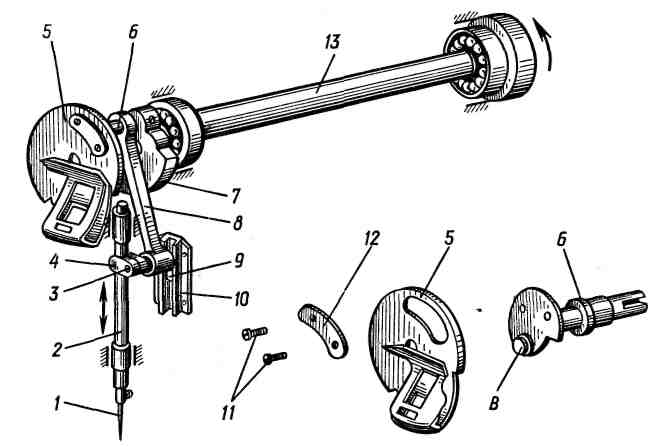
Рис. 11. Схема механізму голки і ниткопритягача машини 97-А класу
кінець пальця поводка надітий повзун 9, що рухається по напрямній 10, закріпленій у головці машини двома гвинтами. Голководій переміщується у двох напрямних втулках.
Таке спряження виключає поворот голковода навколо своєї осі і зменшує згинальні зусилля, які передаються від шатуна голковода, що необхідно під час роботи машини на підвищених швидкостях.
Висота голки 1 відносно носика човника регулюється вертикальним переміщенням голковода 2 після ослаблення гвинта 3. Голка за висотою встановлена правильно тоді, коли при її нижньому крайньому положенні з-під нижньої стінки паза голкотримача видно половину вушка голки.
У разі неправильного встановлення голки за висотою виникають такі неполадки: пропускання стібків (якщо голка встановлена довгим жолобком управо), пропускання стібків (якщо голковід установлений трохи вище від нормального положення, поломка голки або пропускання стібків при низькому положенні голки).
Ниткопритягач. У машині 97-А класу встановлений кулачковий ниткопритягач 5, що рівномірно обертається (рис. 11). Він кінематично зв'язаний з механізмом голки й набуває обертання від головного вала 13. Палець 6, що має складну форму, закріплений у кривошипі 7 двома гвинтами, як уже зазначалось. Ниткопритягач установлений на відростку зовнішнього плеча пальця б, а в його проріз уставлена накладка 12, закріплена двома гвинтами 11. Ниткопритягач має складну конфігурацію. Робоча поверхня його має бути добре відполірована. Наявність навіть незначної шорсткості її країв призводить до ослаблення міцності голкової нитки або до її обриву. До фронтової дошки гвинтом і гайкою прикріплений ніж, призначений для обрізування нитки в разі її обриву.
Своєчасність подавання нитки й затягування стібка регулюються поворотом Ниткопритягача після ослаблення гвинтів 11. Якщо ниткопритягач повернути в бік обертання головного вала при нерухомих робочих органах, то затягування стібка ниткопритягачем відбуватиметься раніше, і навпаки.
Щоб робота на машині була безпечною, ниткопритягач закритий відкидною решіткою, основа якої закріплена на головці машини.
Механізм човника. Човник у машині 97-А класу централь-ношпульний і обертається рівномірно. Обертання йому надає головний вал 1 (рис. 12) через пластмасовий зубчастий пас З (передаточне відношення і = 1:1), який охоплює барабан 2, закріплений на головному валі гвинтами, і барабан 4, закріплений гвинтами 5 на кінці розподільного вала 7. Усередині пас армований стальними дротиками, що захищають його від розтягування. Щоб запобігти зісковзуванню паса з барабанів, у їхні кільцеві розточки вставлено пружинні кільця. Розподільний вал 7 обертається у підшипниках 6 і 17.
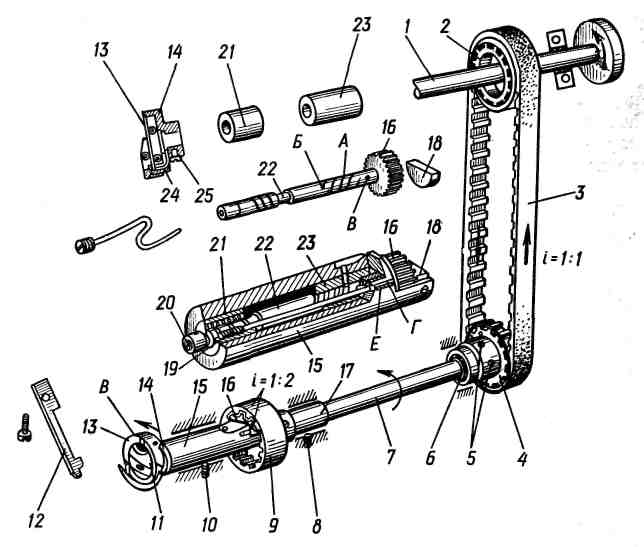 Лівий підшипник
ковзання 17 закріплений гвинтом 8 у платформі машини. Правий підшипник
кочення 6 запресований у приливі платформи машини. На передньому кінці
передавального вала 7 закріплене зубчасте колесо 9 з внутрішніми
зубами. У зачепленні з цим зубчастим колесом перебуває шестерня 16, виготовлена
як одна
Лівий підшипник
ковзання 17 закріплений гвинтом 8 у платформі машини. Правий підшипник
кочення 6 запресований у приливі платформи машини. На передньому кінці
передавального вала 7 закріплене зубчасте колесо 9 з внутрішніми
зубами. У зачепленні з цим зубчастим колесом перебуває шестерня 16, виготовлена
як одна
Рис. 12. Схема механізму човника машини 97-А класу деталь з човниковим
валом 22. Зубчасте колесо 9 і шестерня 16 утворюють внутрішнє зачеплення з передаточним відношенням і — 1:2. Тому за один оберт розподільного вала 7 човниковий вал 22 робить два оберти, що потрібно для процесу утворення стібка.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.