Човниковий вал 22 обертається у двох бронзових втулках 21 і 23, запресованих у втулку 15. Втулка встановлена у прилив платформи машини й закріплена гвинтом 10. У процесі роботи човниковий вал не повинен мати осьових зміщень, тому шестерню 16 човникового вала розміщують між шайбою 19 і сегментним упором 18, прикріпленим трьома гвинтами до втулки.
На передній кінець човникового вала двома гвинтами 25 закріплюють човниковий комплект. Човник 14 має подовжену маточину. Маса його врівноважена зрізом частини маточини. Усередину човника входить шпулетримач 13, який у центрі має вісь для засувки шпульного ковпачка 11. Шпулетримач вільно вставлений усередину човника й утримується півкільцем, що прикріплене до човника гвинтами. Зверху в шпуле-тримачі є паз В, у який вставляють установочний палець 12, прикріплений до платформи машини. Палець утримує шпулетримач 13 від обертання.
Своєчасність підходу носика до голки регулюється поворотом човника 14 після ослаблення його гвинтів 25. При регулюванні положення носика човника відносно голки треба добитись того, щоб після піднімання голки з крайнього нижнього положення на 2 мм носик човника був вищим від верхньої кромки вушка голки на 1 — 1,5 мм. Одночасно має бути забезпечений зазор між носиком човника й голкою, що дорівнює 0,1 мм, який регулюють переміщенням втулки 15 після ослаблення гвинта 10.
Механізм човника має примусове автоматичне мащення від шиберного насоса.
Механізм переміщення матеріалів. Рейка 1 (рис. 13) переміщується в прорізі голкової пластини за траєкторією, близькою до еліпса, забезпечуючи просування матеріалів на задану довжину стібка. Руху рейка набуває від двох вузлів: піднімання і просування. Рушійний механізм у машині 97-А класу набуває руху від головного вала через розподільний вал.
Для піднімання й опускання рейки на розподільному валу 18 двома гвинтами закріплений здвоєний ексцентрик 25.
На праву частину ексцентрика надітий голчастий підшипник, уставлений у головку шатуна 17. Друга головка цього шатуна за допомогою шарнірного гвинта з'єднана з коромислом 27, яке стягуючим гвинтом 26 закріплене на валу піднімання 28. Вал піднімання розміщений у двох центрових пальцях, що закріплені гвинтами 16 у приливах платформи машини. В отвір лівого коромисла вала 28 запресований палець, на який надітий повзун ЗО. Цей повзун охоплюють ріжки рейкової вилки пересувача тканини. Зверху на рейковій вилці двома гвинтами закріплена рейка 1. При обертанні розподільного вала 18 під дією ексцентрика 25 шатун 17 переміщується упоперек платформи машини. Під час руху шатуна до працюючого вал піднімання повертається проти годинникової стрілки і рейка опускається.
Горизонтальних рухів рейка 1 набуває від осьового ексцен-трика 25. Для цього на ліву частину ексцентрика надіта передня головка шатуна 21 з голчастим підшипником. Друга головка цього шатуна, що має вигляд вилки, за допомогою осі 8 з'єднана з вилкуватим шатуном 7. Другий кінець вилкуватого шатуна 7 за допомогою гвинта шарнірно з'єднаний з коромислом, що закріплене стяжним гвинтом 5 на валу просування 4. Вал розміщений у двох центрових пальцях, закріплених гвинтами у приливах машини. Передній кінець цього вала має два вертикально розміщених приливи, що утворюють рамку 3. У рамці за допомогою двох центрових пальців утримується важіль 2 переміщення матеріалів із закріпленою на ньому рейкою 1.
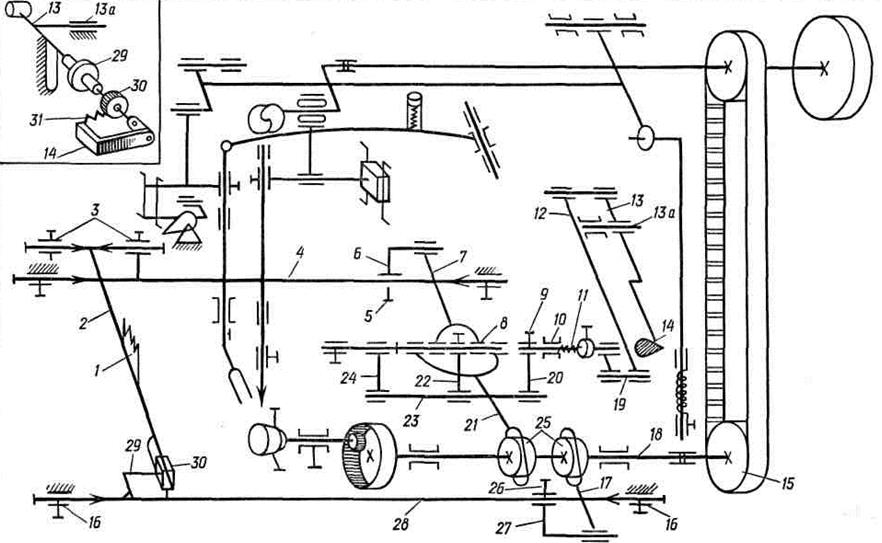 |
Рис. 13. Конструктивна (кінематична) схема машини 97-А класу ОЗЛМ
Між ріжками вилок шатунів 21 і 7 на осі 8 закріплена гвинтом верхня головка з'єднувальної ланки 22. Нижня головка цієї ланки вільно надіта на вісь 23. Лівий кінець осі вставлений в отвір підтримуючої ланки 24, шарнірно з'єднаної з платформою машини. Правий кінець осі 23 гвинтом закріплений у коромислі 20. Це коромисло гвинтом 9 закріплене на лівому кінці вала 10, розміщеного у втулках, що закріплені у приливах платформи машини.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.