Розглянемо вплив
рівня селекції на ефективність навчання СК при розв’язання задачі центрування
контейнерів класів розпізнавання. Оптимізацію рівнів селекції ![]() будемо здійснювати в рамках
алгоритму навчання за МФСВ. Нехай дано
будемо здійснювати в рамках
алгоритму навчання за МФСВ. Нехай дано ![]() – алфавіт М класів
розпізнавання, які можуть перетинатися, і навчальну матрицю
– алфавіт М класів
розпізнавання, які можуть перетинатися, і навчальну матрицю 
![]()
![]() де
де ![]() - кількість ознак і реалізацій
образу відповідно. Відомий вектор параметрів навчання
- кількість ознак і реалізацій
образу відповідно. Відомий вектор параметрів навчання ![]() з обмеженнями
з обмеженнями ![]()
![]() . Треба на етапі навчання побудувати в
бінарному просторі ознак WБ оптимальне в інформаційному розумінні нечітке
розбиття
. Треба на етапі навчання побудувати в
бінарному просторі ознак WБ оптимальне в інформаційному розумінні нечітке
розбиття ![]() і при цьому визначити оптимальні
значення параметрів, які забезпечують максимум критерію функціональної
ефективності (КФЕ) навчання:
і при цьому визначити оптимальні
значення параметрів, які забезпечують максимум критерію функціональної
ефективності (КФЕ) навчання:
 ,
,
де  – усереднений КФЕ навчання;
– усереднений КФЕ навчання;
![]() - області допустимих значень
параметрів навчання.
- області допустимих значень
параметрів навчання.
Тут ![]() – максимум КФЕ навчання розпізнаванню
реалізацій класу
– максимум КФЕ навчання розпізнаванню
реалізацій класу ![]() . Тоді за виразом (2.3.8)
структурований алгоритм оптимізації рівня селекції для пари найближчих класів
. Тоді за виразом (2.3.8)
структурований алгоритм оптимізації рівня селекції для пари найближчих класів ![]() і
і ![]() має вигляд:
має вигляд:
 , (4.7.2)
, (4.7.2)
де ![]() області допустимих значень
відповідних параметрів навчання для класу
області допустимих значень
відповідних параметрів навчання для класу ![]() .
.
При цьому внутрішній цикл алгоритму (4.7.2) реалізується послідовно операторами, які утворюють базовий контур (2.4.2). Наступний цикл реалізується послідовністю операторів контуру оптимізації СКД (2.4.5) і зовнішній цикл - послідовністю операторів контуру оптимізації рівнів селекції (2.4.4) у діаграмі (2.4.3).
Для ілюстрації реалізації
алгоритму (4.7.2) розглянемо задачу побудови контейнера класу ![]() із застосуванням процедури
оптимізації рівня селекції координат вектора
із застосуванням процедури
оптимізації рівня селекції координат вектора ![]() при визначенні інформаційної міри
різноманітності між початковим базовим класом
при визначенні інформаційної міри
різноманітності між початковим базовим класом ![]() і поточним класом
і поточним класом ![]() у процесі автофокусування
електронного мікроскопа РЕМ-103 за зображенням зразка, що досліджується. На рис.4.9а наведено початкове розфокусоване
зображення об’єкту «Гратка» (клас
у процесі автофокусування
електронного мікроскопа РЕМ-103 за зображенням зразка, що досліджується. На рис.4.9а наведено початкове розфокусоване
зображення об’єкту «Гратка» (клас ![]() ), а на рис.4.9б - зображення цього об’єкту, отриманого
на S-му кроці настроювання (клас
), а на рис.4.9б - зображення цього об’єкту, отриманого
на S-му кроці настроювання (клас ![]() ).
).

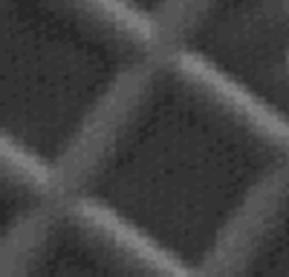
а) б)
Рис. 4.9. Зображення об’єкту «Гратка»: а) початкове розфукусоване зображення; б) поточне зображення.
У процесі реалізації алгоритму
навчання як критерій
оптимізації використовувалася
модифікація (3.5.2) і було побудовано отимальний контейнер ![]() , радіус
, радіус ![]() якого, як видно з рис.
4.10, дорівнює 35 одиницям кодової відстані при значенні КФЕ
якого, як видно з рис.
4.10, дорівнює 35 одиницям кодової відстані при значенні КФЕ ![]() .
.
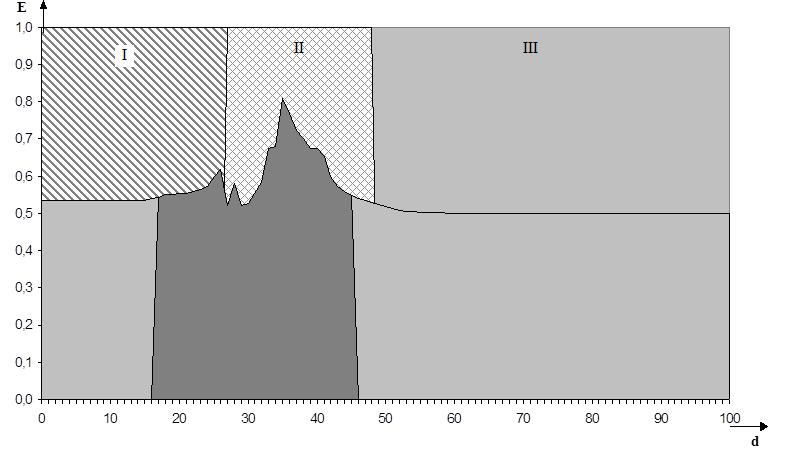
Рис. 4.10.
Залежність КФЕ від радіуса контейнера ![]()
На рис.4.10 найбільш темна область
графіка позначає робочу область визначення функції (3.5.2). В області І присутні
тільки реалізації класу ![]() , в області перетину ІІ присутні реалізації класів
, в області перетину ІІ присутні реалізації класів ![]() і
і ![]() , а в області ІІІ - тільки реалізації класу
, а в області ІІІ - тільки реалізації класу ![]() .
.
У табл. 4.4 наведено значення критерію
Е1 першої достовірності ![]() і помилки другого роду b, параметрів навчання r1,
і помилки другого роду b, параметрів навчання r1, ![]()
![]() і міжцентрова кодова відстань
і міжцентрова кодова відстань ![]() . Як видно з табл. 4.5, оптимальне
значення рівня селекції дорівнює
. Як видно з табл. 4.5, оптимальне
значення рівня селекції дорівнює ![]() , а оптимальне поле контрольних
допусків для і-ї ознаки дорівнює
, а оптимальне поле контрольних
допусків для і-ї ознаки дорівнює ![]() , де d*=12 градаціям яскравості. Незважаючи на те, що при r1=0,54 значення критерію Е1 таке саме як
і при r1 = 0,56,
за оптимальне приймається рівень
, де d*=12 градаціям яскравості. Незважаючи на те, що при r1=0,54 значення критерію Е1 таке саме як
і при r1 = 0,56,
за оптимальне приймається рівень ![]() , оскільки він забезпечує більшу
міжцентрову відстань
, оскільки він забезпечує більшу
міжцентрову відстань ![]() .
.
Таблиця 4.4
Результати
оптимізації контейнера ![]()
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.