в котором индексом Т обозначена операция транспонирования (и, следовательно, е то означает скалярное произведение векторов; напомним, что мы используем матричную символику).
Граница тела, подлежащая дискретизации
Отдельный элемент Узел
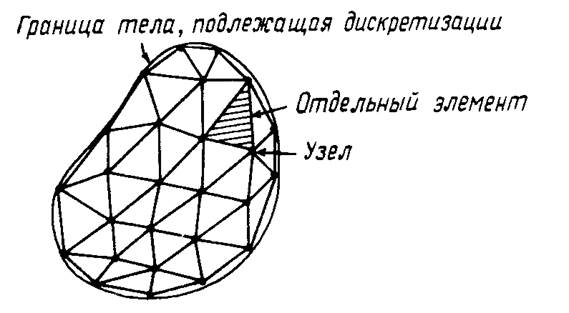
рис, 7.16, Дискретизация сплошного тела по методу конечных элементов.
206
Глава 7. Анализ напряжений при неустановившейся ползучести
Используя соотношения (7.29) и (7.32), преобразуем выписанное уравнение к следующей форме:
aT\fy([L][N])TodV-
-f [N]TpdS \ = О,
Р
откуда следует, что выражение в фигурных скобках равно нулю, т.е. / [B]TodV - F=0. Здесь введены обозначения
[B] = [L\[N], F = / [N]TbdV+ f [N}TpdS.
SP
Подставляя определяющие соотношения (7.30) и (7.31), получим уравнение
[K]a-Fc-F = 0, (7.33)
в котором определены матрица жесткости
(K]-fy[B]T(D][B]dV
и вектор усилий, обусловленных ползучестью,
Fc = fr[B]T[D]tcdV.
Уравнения для процесса перераспределения напряжений выводятся следующим образом. Записав соотношения (7.30), (7.31) и (7.32) в скоростной форме, находим равенство
подставляя в которое решение уравнения (7.33), получаем
Используя теперь определяющее уравнение теории ползучести, например, в виде ёс = / (а, f), получим следующее уравнение для задачи Коши:
— (, -e°) = [D]fB][K]-1(J (B]T[D]f(o,t)dV)-[D]f(o,t], (7.34) dtV
в котором о° = [D][fl][*:]~1F - эквивалентное упругое напряжение. Из последнего соотношения вытекает начальное условие
«(0)-в°(0). (7.35)
которое полностью определяет требуемую задачу Коши.
Сосредоточим теперь внимание на проблеме разыскания конечного множества значений а., i= 1, 2, ..., G, в G точках интегрирования внутри области V. Объемные интегралы будем вычислять при помощи квадратурной формулы
? */<*»),-
7.6. Метод конечных элементов
207
конкретный вид которой пока не фиксируем. ^Отметим лишь, что весовые коэффициенты ckположительны.
Обозначая через а. , [В. ] значения а и [В] в точках интегрирования г = 1, 2, ..., G, из уравнения (7.34) получим систему
—в. =[ОПВ.][КГ'( 2 c,[B.]T[D]f(et))-[D]f(o;, t) + *,°,
dt '7=1
i-1,2.....G. (7.36)
Аналогичную систему уравнений можно вывести и для процесса изменения неупругих деформаций е . Не останавливаясь на подробных выкладках, приведем лишь результат
_!-• ./([Й^ККГ1 2 c[B]T[0-]V-[D]ea. +a,°.t), dt j= i '
i =1, 2.....G. (7.37)
Построить аналитическое решение уравнений (7.36) или (7.37) для практически интересных задач, как правило, невозможно, и обычно для их решения применяют численные алгоритмы. Ниже мы опишем два таких алгоритма.
7.6.1 Явная схема Эйлера
Из всех существующих схем численного интегрирования наибольшее распространение в методе конечных элементов (применительно к пошаговому решению задач теории ползучести) получила, по-видимому, схема Эйлера. Реализуется данная схема следующим образом:
1. Строится решение исходной упругой задачи, в котором формируются вектор F и матрица [К]~1 . Полагая ес|. = 0 во всех уанах интегрирования, вычисляют
2. Вычисляется шаг по времени At, и из определяющего уравнения
вычисляются значения ё :
3. Определяются приращения деформаций ползучести
4. Формируются векторы fh fc, где
ГЛАВА 8
ПРИБЛИЖЕННОЕ РЕШЕНИЕ ЗАДАЧ ТЕОРИИ НЕУСТАНОВИВШЕЙСЯ ПОЛЗУЧЕСТИ
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.