Преимуществом использования рассмотренной схемы (рис. 5.9) является то, что контрольные сигналы можно вводить непосредственно на входе элементов антенной решетки и, таким образом, компенсировать амплитудно-фазовые ошибки приемных каналов, так как они будут учтены в сформированном в результате адаптации весовом векторе.
К недостаткам системы можно отнести:
требуется большой динамический диапазон приемных каналов, в связи с тем, что значительная часть его должна быть отведена под контрольный сигнал;
контрольный сигнал на выходе системы должен быть хорошо отфильтрован;
в цепи вычисления весовых коэффициентов должны быть приняты меры по недопущению искажений контрольного сигнала.
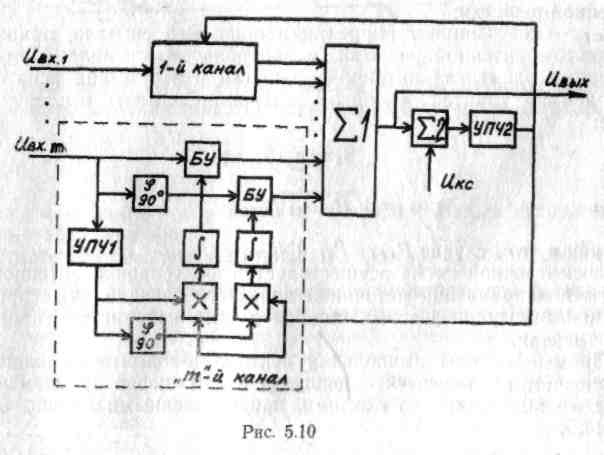
Второй способ использования контрольных сигналов для адаптивных антенных решеток с равноценными каналами связан с реализацией алгоритма, минимизирующего среднюю квадратиче-скую ошибку (МСКО). При этом вырабатывается контрольный сигнал Ukc(t), являющийся в статистическом смысле копией полезного сигнала, принимаемого антенной решеткой. Данный алгоритм целесообразно использовать в системах связи и в доплеровских РЛС, использующих простые «вазинепрерывные сигналы. Структурная схема адаптивной системы, реализующей алгоритм МСКО, представлена на рис. 5.10.
277
|
|
|
|
|
Выходное напряжение второго сумматора равно |
|
Напряжение на выходе перемножителей m-го канала в комплексной форме записи имеет вид |
Подставив (5.17) в (5.8) и усреднив по реализациям, для приемной системы с равноценными каналами получим
TR + R=Ks[ФR-Sa],
где Sa — вектор, элементы которого равны
Стационарное решение этого уравнения
R=Ке(КsФ-1)-1Sa
и при /Cs-»-oo имеем R = 0-1Sa-Рассмотрим элементы вектора Sa
![]()
где Ра — мощность полезного сигнала, принятого i-u элементом антенной решетки;
ркс/ — коэффициент .корреляции полезного сигнала, принятого элементом антенной .решетки, и контрольного сигнала. При равноценных элементах антенной решетки и отсутствии искажений в приемных трактах вектор Sa можно представить в следующем виде:
где
так как в этом случае Р« = Pcj и jp^tl = /pKc//-Б .рассмотренной схеме осуществляется фокусировка антенной системы в направлении источника полезного сигнала даже при наличии амплитудно-фазовых ошибок в антенной системе и приемных трактах.
.Прямые методы вычисления'вектора весовых коэффициентов в основном реализуются с использованием цифровой элементной базы в соответствии со схемами, представленными на .рис. 5.11,0 и 5.11,6.
Адаптивная 'пространственная обработка сигналов в схеме на рис. 5.11,а реализуется полностью цифровыми устройствами. Колебания с выходов антенной решетки в АЦП преобразуются в
цифровой код Zl,.--,zm я поступают в многоканальный цифровой коррелятор, где оценивается корреляционная матрица помех

где Zi -i-e выборочное значение вектора входных сигналов;
k—число выборок.
Далее в вычислителе оценивается вектор весовых коэффициен-,. -1
тов И = аФ Sub цифровой форме осуществляются когерентные
компенсация помех и сложение полезного сигнала. Выходной код
2ВЫх поступает в устройство временной обработки сигналов.
В адаптивной системе, представленной на рис. 5.11,6, цифровые
устройства используются только при вычислении вектора весовых
коэффициентов, а когерентные компенсация помех и 'сложение полезного сигнала осуществляются в аналоговом виде. Выходной сигнал Uвых подается «а устройство временной обработки в аналоговом виде. Следует иметь в виду, что требования к АЦП и цифровым устройствам по быстродействию во втором устройстве могут быть несколько облегчены. Здесь может не выполняться теорема Котельникова, но при этом время вычисления вектора весовых коэффициентов увеличивается.
5.3.2. Адаптивные системы с выделенным основным приемным каналом
Оптимальный вектор весовых коэффициентов для системы с выделенным основным приемным каналом описывается соотношением [2]
R=aO-i0o,
(5.19)
где Ф0— вектор взаимной корреляции выходных сигналов выделенного и вспомогательных каналов;
Ф — корреляционная матрица помеховых колебаний, принятых вспомогательными каналами.
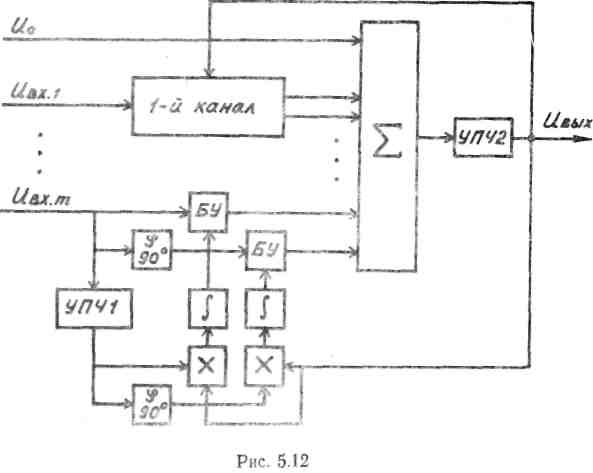
Устройство, реализующее адаптивную систему .в соответствии с (5.19) при наличии обратных связей, представлено на рис. 5.12.
Используя методику, описанную в предыдущем разделе^ с учетом того, что

получим дифференциальное уравнение
TR + R = /Cs(Ф0-RФ). Стационарное решение этого уравнения имеет вид
и при Кs-*"00 имеем К = Ф_1Ф0.
Прямые методы вычисления вектора весовых коэффициентов основаны на цифровом оценивании Ф и Ф0 ib многоканальных корреляторах и оценивании весового вектора в вычислителе аналогично структурным схемам для систем с равноценными каналами, представленными на рис. 5.11,а и 5.11,6.
Все адаптивные методы вычисления вектора весовых коэффициентов с обратными связями могут быть реализованы на основе цифровой элементной базы после преобразования аналоговых сигналов в АЦП. При этом дифференциальные уравнения, описывающие работу адаптивных систем, заменяются разностными уравнениями.
Основными элементами адаптивных систем с обратными связями, как видно из предыдущего материала, являются однока-нальные автокампенсаторы помех. В качестве них могут использоваться не только квадратурные, но и гетеродинные автокомпенсаторы помех.
5.3.3. Техническая реализация элементов адаптивных систем пространственной обработки сигналов
Любая адаптивная система состоит из двух устройств: устройства весового когерентного суммирования принятых антенной колебаний и устройства вычисления весовых коэффициентов.
Устройство весового когерентного суммирования колебаний включает т весовых модулей и сумматор и может быть реализован на высокой частоте непосредственно на выходах элементов антенной решетки, на промежуточной частоте и в цифровой форме, после АЦП. Весовые модули изменяют амплитуду и фазу принятых колебаний в соответствии с комплексным весом, полученным в устройстве вычисления весовых коэффициентов.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.