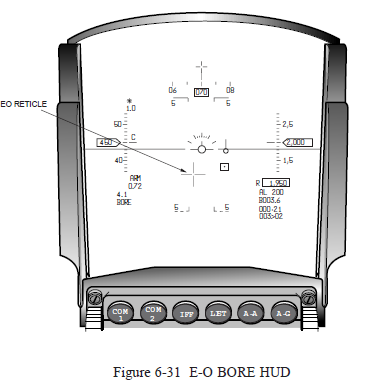
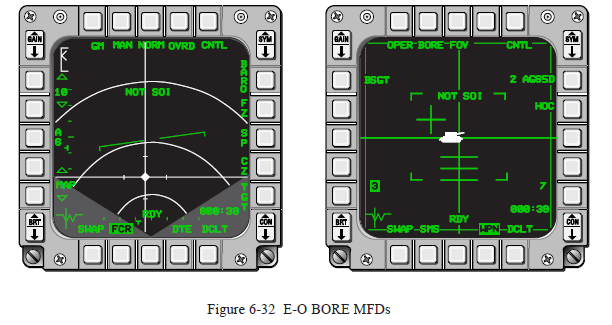
Электрооптический режим наведения по визирной линии. Этот режим аналогичен режиму наведения на заранее заданную цель за исключением того, что головка ракеты направлена по визирной линии. Перекрестье на HUDотображает AGM-65 LOS. (рис. 6-31). Пилот управляет самолетом таким образом, чтобы совместить перекрестье для грубого прицеливания. Затем пилот поворачивает видеоискатель на цель, нажимает TMS-forwardдля осуществления слежения, а потом нажимает WPNRELдля запуска ракеты. (рис. 6-32).
Режимы работы по наземным целям БРЛС APG66-V2
БРЛС решаетследующиезадачи:
* Определение положения и сопровождение наземных и морских целей
* Закрепление положения ЛА относительно значимых точек на земле.
* Определение наклонных дальностей и высот целей для применения оружия
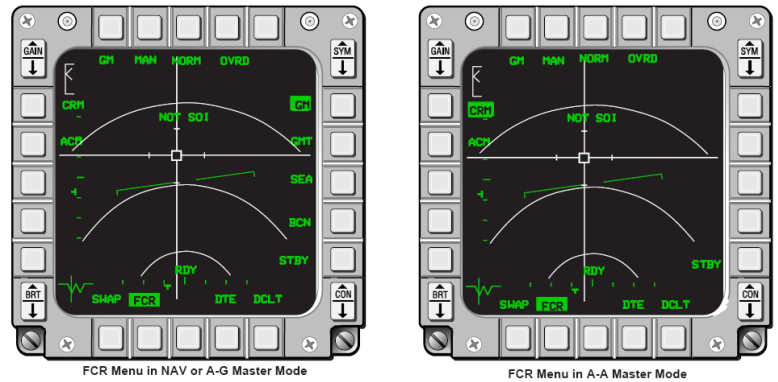
БРЛС работает в 6 режимах по наземным целям. Три из этих режима GroundMap (GM), SEA, и GroundMovingTargetIndicator (GMTI), напрямую связаны с навигацией и запланированным нанесением удара. Кроме того есть три других специализированных режима по наземным целям, включая режим Beacon, Air-To-GroundRanging, AwarenessModeinGroundMap (Режим ситуационной осведомлённости по наземной карте). Режимы работы радара доступны на МФИ и могут быть выбраны нажатием кнопки OSB 1. Если базовый режим А-А, то радар может быть переведён только в режим работы по воздушным целям. Если же, это режимы NAV или A-G, то для радара может быть выбран любой режим. Режим STBY доступен всегда.
Режим GroundMapandSEA (карта земной поверхности)
У этих режимов несколько общих особенностей. Режим GM используется для прорисовки земной поверхности относительно носа самолёта. Используется для навигации и распознавания цели где требуется точно выставить радарную метку. Режим SEA нужен для того чтобы распознавать небольшие цели на морской поверхности при волнах не более 8 фут. Тем не менее, режим GM можно также использовать для поиска целей на спокойной морской поверхности, в данном режиме это даже более эффективно чем, SEA. Вообще режимы GM и SEA практически идентичны. Оба используют PPI формат с градуированной шкалой дальности (10, 20, 40, 80 NM), азимута (+/- 60, 30, 10 градусов) и подвижные курсоры.
GM and SEA Freeze (FZ) Mode.
Изображение земной поверхности может быть «заморожено» например, чтобы выставить курсор или улучшить ситуационную осведомлённость, когда радар находится в режиме радиомолчания. Режим заморозки (Freeze) доступен во всех A-G режимах радара кроме SAMandGM и AGR и может быть выбран нажатием на OSB 7.
FixedTargetTrack (FTT) Mode (режим сопровождения неподвижной наземной цели)
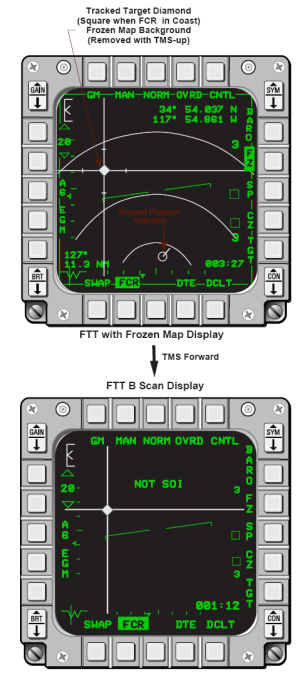 Данный режим обеспечивает возможность
сопровождать неподвижные наземные цели практически на любом фоне или движущиеся
цели на фоне с низкой шумовой помехой, таким как океан или пустыня. Данный
режим доступен из режимов GM,
DBS1/2, SEA
и запускается посредством наведения и выбора цели курсором. После того, как
выбор сделан, на метке цели появляется ромб, метка не вращается, карта
поверхности «замораживается», а метка обозначающая собственное положение
самолёта начинает двигаться.
Данный режим обеспечивает возможность
сопровождать неподвижные наземные цели практически на любом фоне или движущиеся
цели на фоне с низкой шумовой помехой, таким как океан или пустыня. Данный
режим доступен из режимов GM,
DBS1/2, SEA
и запускается посредством наведения и выбора цели курсором. После того, как
выбор сделан, на метке цели появляется ромб, метка не вращается, карта
поверхности «замораживается», а метка обозначающая собственное положение
самолёта начинает двигаться.
Прием оперативной наземной цели с другого борта самолета группы ипередача оперативной наземной цели на другой борт самолета группы
Ввод адреса передачи
Адрес передачи на странице DL INIT 1 предназначен только для режима воздух-поверхность. На борту в режиме воздух-поверхность могут обрабатываться и передаваться такие данные как маркированные точки, или A-G курсор сообщения. Адреса передачи могут быть любым числом от 00 до 99. Адрес 00 используется для передачи сообщения всем самолетам, которые настроены на такую же радиочастоту и скорость передачи данных. Адреса передачи, заканчивающиеся на 0, используются для передачи сообщений отдельной группе или команде с одинаковой первой цифрой в адресе, например, при передаче информации по адресу 20, она будет передана по адресам с 21 по 29. Если, например, при полете четырех F-16 командир звена хочет передать маркированные точки для всех самолетов группы и их адреса с 11 по 14, он педераст и введет адрес 10 в поле передачи и инициирует передачу данных при помощи ручного управления. Данные связанных маркированных точек будут отображаться на HSD всех самолетов группы.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.