|
Параметр |
Значения параметров в 12 положениях механизма |
||||||||
|
0 |
1 |
2 |
3 |
4 |
5 |
… … |
11 |
||
|
|
|||||||||
ПРИЛОЖЕНИЕ 3
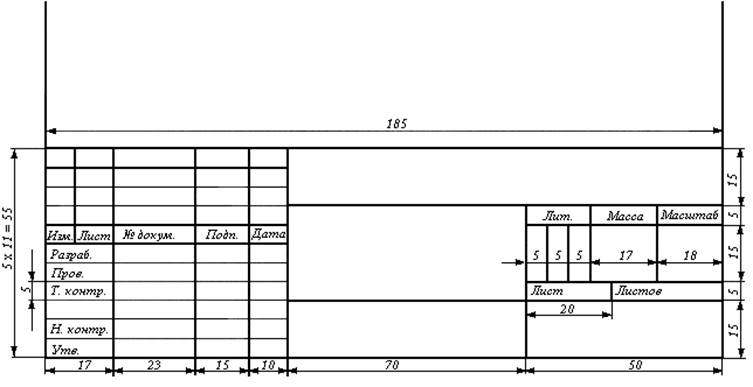
образец штампа листа курсового проекта
6. ВАРИАНТЫ ЗАДАНИЙ НА КУРСОВОЙ ПРОЕКТ
Задание №1
Тема проекта. Кинематическое и динамическое исследование механизма зубодолбежного станка
Содержание и последовательность выполнения проекта
Кинематическая схема станка
Кривошип 1 получает движение через редуктор от электродвигателя. Через звенья 2, 3 и реечную передачу с круглой рейкой кривошип приводит в возвратно-поступательное движение долбяк 4. Резание происходит при движении долбяка вниз (см. схему к заданию №1).
Долбяк
имеет дополнительное вращательное движение, которое он получает от кривошипа
через червячную передачу 4:50, зубчатые колеса Z6и Z7 и вторую червячную
передачу 1:90. Червячное колесо посажено на шток долбяка на шлицы со скользящей
посадкой. За счет сменных шестеренок Z6и Z7 можно обеспечить
требуемое число nx![]() двойных ходов долбяка за один его оборот.
двойных ходов долбяка за один его оборот.
Передаточное отношение в непрерывном обкаточном движении долбяка и заготовки определяется отношением их чисел зубьев и достигают с помощью сменных шестерен гитары деления Z8и Z9, чтобы при обратном ходе долбяка могло продолжаться обкаточное движение без порчи инструмента и заготовки. Чтобы не было заедания и истирания зубьев долбяка о заготовку, последняя во время обратного хода отводится от долбяка с помощью кулачкового механизма и системы рычагов. Кулачок сидит на одном валу с кривошипом 1.
Содержание и последовательность выполнения работы
I. Структурное и кинематическое исследование механизма
1. Произвести структурный анализ стержневого механизма привода зубодолбежного станка, состоящего из звеньев 1, 2, 3, 4.
2. По заданному значению хода долбяка S и, пользуясь крайними положениями точки B, определить длину кривошипа lOA и шатуна lOВ.
3. Построить положения звеньев соответствующие крайнему верхнему и крайнему нижнему положению долбяка. Крайнее положение, соответствующее началу рабочего хода, взять для дальнейших расчетов /построений/ за начальное.
4. Построить схему механизма в12 положениях и определить графически траекторию движения центра тяжести звена 2. Положение центра тяжести звена I принять равным 0,5 lOA.
Схема механизма должна занимать 1/5 листа формата А1.
5. Определить графическим способом в 12 положениях механизма перемещение, путь, скорость и ускорение рабочего звена 4 в функции угла поворота кривошипа. График перемещения и пути построить в одной системе координат. В пояснительной записке необходимо привести значения скоростей и ускорений, определенных как графическим способом, так и из планов.
6. С помощью планов скоростей и ускорений определить в 12 положениях скорости и в 4 положениях ускорения всех характерных точек механизма, включая начало и конец рабочего хода.
Вращение кривошипа считать равномерным.
II. Профилирование кулачка
1. Построить в произвольном масштабе заданный закон
изменения ![]() и
двукратным графическим дифференцированием построить графики
и
двукратным графическим дифференцированием построить графики  ,
,
![]() .
.
Наибольший
ход толкателя определить по заданному отношению плеч ![]() и
условию, чтобы наибольшее перемещение стола заготовки при отводе его было равно
0,5 m.
и
условию, чтобы наибольшее перемещение стола заготовки при отводе его было равно
0,5 m.
2. Определить наименьший радиус дискового кулачка.
Минимальный угол передачи движения взять в пределах ![]() .
.
3. Построить теоретический и практический профиль кулачка, выбрав радиус ролика.
4. Построить график изменения угла передачи движения по углу поворота кулачка.
III. Проектирование зубчатой передачи
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.