












Каждая из структурных групп имеет: два подвижных звена (n`=n2`=2),причем все звенья двухвершинные (t=2) и, значит, базовое звено также имеет две вершины (Т=2); три (р=3) одноподвижные (р1=3) кинематические пары, из которых две внешние(S`=2).
1.1.16 Проверяем, соответствуют ли выделенные структурные группы их математическим моделям. Так как группы одинаковы, проверку ведем только по одной группе, например ОАВ. Подставив в структурную модель группы исходные данные (р=3, р1=3, n=2, n2=2, Z=0, T=2, t=2, S`=2), получем:
P=0,5 ; 3=0,5(2*2+2), 3=3;
n`= 2=0+2, 2=2
3=3;
k=3-2, k=1;
k=p-n`; 3=3;
p=;
Анализ полученных выражений показывает, что выделенные кинематические цепи являются структурными группами Асура.
1.1.17 Проверяем, не распадаются ли выделенные структурные группы на более простые. Видно, что выделенные структурные группы являются самыми простыми для трехподвижного пространства, в котором существует исследуемый механизм, и, значит, они не могут иметь в своем составе другие более простые группы Асура.
1.1.18 Проводим классификацию структурных групп по И.И.Артоболевскому (табл.1.3).
Табл.1.3
1.1.19 Определяем класс сложного механизма вытяжного пресса. Механизм вытяжного пресса относится ко ΙΙ классу.
2. Кинематический анализ механизма вытяжного пресса
2.1. Построение планов положений исследуемого механизма.
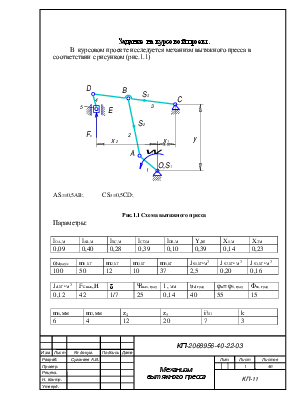
Выбираем масштабный коэффициент длин по формуле:(м/мм), где -истинная длина кривошипа, -чертеж- ный размер кривошипа. Расcчитываем чертежные размеры звень- ев:(табл.2.1).
Табл.2.1.Чертёжные размеры звеньев
|
OA, мм |
AB, мм |
BС, мм |
СD, мм |
DE, мм |
X1, мм |
X2, мм |
Y, мм |
|
45 |
200 |
140 |
195 |
50 |
70 |
115 |
195 |
Строим тринадцать планов положений исследуемого механизма вытяжного пресса (см. Приложение №1).
2.2. Кинематическое исследование машин и механизмов аналитическим способом
Для нахождения кинематических характеристик механизма в соответствии с методом замкнутых векторных контуров поступаем следующим образом.
1.Рисуем в любом промежуточном положении структурную схему механизма (возьмем второе положение).
2.Выбираем координатную систему. Начало координат связываем со стойкой начального звена.
3.Все звенья, включая стойку, заменяем векторами произвольного направления.
4.Полученные векторы обьединяем между собой так, чтобы они образовывали замкнутые контуры. Причем в каждый контур должно входить не более двух неизвестных величин. Разбивку контуров начинаем от звена, связанного с обобщенной координатой.
5.Составляем векторные уравнения замкнутости полученных контуров.
6.Спроектировав векторные уравнения замкнутости контуров на оси Х и Y, получим базовые системы уравнений для расчета кинематических характеристик звеньев и их отдельных точек.
|
Известная величина |
l1 , м |
l2 , м |
l3 , м |
l34 , м |
l5 , м |
|
Значение |
0,09 |
0,4 |
0,28 |
0,71 |
1,25 |
lAS2=0,2м; lCS3=0,195м;
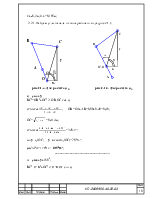
2.2.1.Найдем углы начала и конца рабочего хода (рис.2.1.):
рис.2.1.а. Для расчёта φн рис.2.1.б. Для расчёта φк
а) φн=α+β;
BC2=OB2+OC2-2·OB·OC cos α;
α=arccos; OB=OA+AB=0,09+0,40=0,49;
OC==0,414 м;
α=arccos=34049’;
cosβ=x1/OC; β=arccos(x1/OC)=70014’;
φн=34049’+70014’=105003’;
_________________________________
б) φк=α+β+1800;
BC2=O’B2+OC2-2·O’B·OC cos α;
α=arccos; O’B=AB-OA=0,31 м; OC=0,414 м;
α=arccos=42033’;
cosβ=x1/OC; β=arccos(x1/OC)=70014’;
φк=42033’+70014’+1800=292047’;
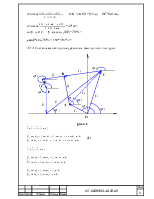
2.2.2. Составляем векторные уравнения замкнутости контуров:
рис.2.2
;
(1)
;
Поделим соответствующие части уравнений:
;
;
;
(2)
Возведём оба уравнения (2) в квадрат и сложим соответствующие части полученных уравнений:
;
φ2- φ9=β; φ2 =β+φ9; β = arccos; - угол между векторами l2 и l9;
φ3 =π-arcsin;
_________________________________________
;
; φ7 =;
(3)
;
φ5 =2π-arccos;
;
Величины φ2, φ3 ,φ5 ,l7 ,рассчитанные по выше выведенным формулам заносим в табл. 2.2.
Найдем центры масс звеньев 2, 3. Составляем замкнутые контура:
;
;
(4)
(5)
Величины, рассчитанные по формулам (4), (5) заносим в табл. 2.2.
Табл.2.2.Результаты расчётов положений звеньев
|
Положение |
φ1,O |
φ2,O |
φ3,O |
φ5,O |
l7,м |
|
0 |
105,066 |
105,066 |
162,723 |
271,377 |
-0,4059 |
|
1 |
135 |
99,791 |
165,984 |
274,812 |
-0,3848 |
|
2 |
165 |
97,391 |
173,855 |
280,230 |
-0,3333 |
|
3 |
195 |
97,551 |
183,432 |
281,128 |
-0,2685 |
|
4 |
225 |
100,064 |
192,331 |
276,317 |
-0,2073 |
|
5 |
255 |
104,746 |
198,772 |
269,572 |
-0,1645 |
|
6 |
285 |
111,015 |
201,702 |
265,616 |
-0,1461 |
|
7 |
292,79 |
112,765 |
201,833 |
265,426 |
-0,1453 |
|
8 |
315 |
117,624 |
200,757 |
266,953 |
-0,1519 |
|
9 |
345 |
122,719 |
195,911 |
272,900 |
-0,1832 |
|
10 |
15 |
124,167 |
187,334 |
279,677 |
-0,2416 |
|
11 |
45 |
120,505 |
176,258 |
281,051 |
-0,3173 |
|
12 |
75 |
112,882 |
166,481 |
275,275 |
-0,3816 |
|
Положение |
φ1,O |
S2X,м |
S2Y,м |
S3X,м |
S3Y,м |
|
0 |
105,066 |
-0,0754 |
0,2800 |
-0,0462 |
0,4479 |
|
1 |
135 |
-0,0976 |
0,2607 |
-0,0492 |
0,4372 |
|
2 |
165 |
-0,1127 |
0,2216 |
-0,0539 |
0,4109 |
|
3 |
195 |
-0,1132 |
0,1750 |
-0,0546 |
0,3783 |
|
4 |
225 |
-0,0986 |
0,1333 |
-0,0505 |
0,3484 |
|
Положение |
φ1,O |
S2X,м |
S2Y,м |
S3X,м |
S3Y,м |
|
5 |
255 |
-0,0742 |
0,1065 |
-0,0446 |
0,3272 |
|
6 |
285 |
-0,0484 |
0,0998 |
-0,0412 |
0,3179 |
|
7 |
292,79 |
-0,0425 |
0,1014 |
-0,0410 |
0,3175 |
|
8 |
315 |
-0,0291 |
0,1136 |
-0,0423 |
0,3209 |
|
9 |
345 |
-0,0212 |
0,1450 |
-0,0475 |
0,3365 |
|
10 |
15 |
-0,0254 |
0,1888 |
-0,0534 |
0,3651 |
|
11 |
45 |
-0,0379 |
0,2360 |
-0,0546 |
0,4027 |
|
12 |
75 |
-0,0545 |
0,2712 |
-0,0496 |
0,4356 |
С целью проверки правильности полученных выражений все вычисленые по формулам величины сравниваем с соответствующими величинами, найденными из плана механизма для второго положения (φ1=165О). Результаты сравнений приведены в табл. 2.3.
Таблица 2.3.Сравнение полученных результатов
|
Величина |
φ1,O |
φ2,O |
φ3,O |
φ5,O |
l7,м |
|
Графически |
165 |
97,392 |
173,856 |
280,230 |
-0,3333 |
|
Аналитически |
165 |
97,391 |
173,855 |
280,230 |
-0,3333 |
|
Отклонение, D % |
0 |
0,001 |
<0,001 |
0 |
0 |
|
Величина |
φ1,O |
S2X,м |
S2Y,м |
S3X,м |
S3Y,м |
|
Графически |
165 |
-0,1127 |
0,2216 |
-0,0539 |
0,4109 |
|
Аналитически |
165 |
-0,1127 |
0,2216 |
-0,0539 |
0,4109 |
|
Отклонение, D % |
0 |
0 |
0 |
0 |
0 |
Как видно из таблицы, графический метод, выполненный с помощью компьютерных средств автоматизированного проектирования, не уступает в точности аналитическому методу. Так как отклонение графической величины от аналитической не превышает 0,001%, то в дальнейшем рассчитывать его нет смысла.
2.2.3. Нахождение аналогов скоростей аналитическим способом.
Продифференцируем системы уравнений (1) и (3) по обобщенной координате j1:
(6)
;
;
;
;
(7)
; ;
Величины , , , ,рассчитанные по выше выведенным формулам заносим в табл. 2.4.
Рассчитываем аналоги скоростей центров масс. Для этого продифференцируем уравнения координат центров масс(4) и (5):
Величины, рассчитанные по полученным формулам заносим в табл. 2.4.
Таблица 2.4. Результаты расчётов аналогов скоростей
|
Положение |
||||||||
|
0 |
-0,225 |
0 |
0 |
0 |
-0,043 |
-0,012 |
0 |
0 |
|
1 |
-0,127 |
0,203 |
0,192 |
0,075 |
-0,039 |
-0,059 |
-0,010 |
-0,038 |
|
2 |
-0,036 |
0,306 |
0,131 |
0,116 |
-0,016 |
-0,086 |
-0,006 |
-0,059 |
|
3 |
0,045 |
0,320 |
-0,076 |
0,126 |
0,014 |
-0,088 |
0,004 |
-0,062 |
|
4 |
0,122 |
0,264 |
-0,221 |
0,103 |
0,040 |
-0,068 |
0,011 |
-0,050 |
|
5 |
0,187 |
0,160 |
-0,201 |
0,059 |
0,051 |
-0,033 |
0,010 |
-0,030 |
|
6 |
0,223 |
0,034 |
-0,049 |
0,012 |
0,045 |
0,007 |
0,002 |
-0,006 |
|
7 |
0,225 |
0 |
0 |
0 |
0,041 |
0,017 |
0 |
0 |
|
8 |
0,207 |
-0,097 |
0,134 |
-0,035 |
0,027 |
0,044 |
-0,007 |
0,018 |
|
9 |
0,121 |
-0,226 |
0,242 |
-0,086 |
0,003 |
0,074 |
-0,012 |
0,042 |
|
10 |
-0,034 |
-0,340 |
0,172 |
-0,134 |
-0,018 |
0,091 |
-0,008 |
0,066 |
|
11 |
-0,205 |
-0,376 |
-0,098 |
-0,145 |
-0,028 |
0,084 |
0,005 |
0,073 |
|
12 |
-0,279 |
-0,245 |
-0,225 |
-0,091 |
-0,035 |
0,045 |
0,011 |
0,046 |
2.2.4. Нахождение аналогов ускорений аналитическим способом.
Продифференцируем системы уравнений (6) и (7) по обобщенной координате j1:
(8)
(9)
В первом уравнении системы (8) из аргументов всех тригонометрических функций вычитаем угол j3:
;
;
Из второго уравнения системы (8) получаем:
;
Из уравнений (9):
;
;
Для определения аналогов ускорений центров масс продифференцируем уравнения скоростей центров масс:
Все полученные результаты заносим в таблицу 2.5:
Таблица 2.4. Результаты расчётов аналогов ускорений
|
Положение |
||||||||
|
0 |
0,175 |
0,466 |
0,540 |
0,172 |
-0,008 |
-0,106 |
-0,027 |
-0,087 |
|
1 |
0,187 |
0,294 |
0,126 |
0,110 |
0,027 |
-0,073 |
-0,006 |
-0,058 |
|
2 |
0,162 |
0,105 |
-0,321 |
0,049 |
0,055 |
-0,028 |
0,016 |
-0,022 |
|
3 |
0,149 |
-0,046 |
-0,393 |
-0,013 |
0,057 |
0,019 |
0,019 |
0,010 |
|
4 |
0,140 |
-0,160 |
-0,127 |
-0,070 |
0,037 |
0,056 |
0,007 |
0,033 |
|
5 |
0,105 |
-0,228 |
0,191 |
-0,091 |
0,005 |
0,075 |
-0,010 |
0,044 |
|
6 |
0,025 |
-0,248 |
0,355 |
-0,088 |
-0,024 |
0,076 |
-0,018 |
0,045 |
|
7 |
-0,003 |
-0,249 |
0,363 |
-0,087 |
-0,030 |
0,074 |
-0,018 |
0,045 |
|
8 |
-0,094 |
-0,249 |
0,309 |
-0,092 |
-0,043 |
0,065 |
-0,015 |
0,046 |
|
9 |
-0,235 |
-0,242 |
0,070 |
-0,102 |
-0,046 |
0,046 |
-0,003 |
0,048 |
|
10 |
-0,340 |
-0,175 |
-0,361 |
-0,070 |
-0,031 |
0,015 |
0,018 |
0,037 |
|
11 |
-0,271 |
0,073 |
-0,541 |
0,042 |
-0,013 |
-0,043 |
0,027 |
-0,016 |
|
12 |
-0,002 |
0,409 |
0,151 |
0,154 |
-0,017 |
-0,101 |
-0,007 |
-0,080 |
2.3.Построение планов скоростей и ускорений
Построим план скоростей для второго положения механизма вытяжного
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.