4. Силовой анализ механизма.
4.1 Силовой анализ механизма аналитическим методом
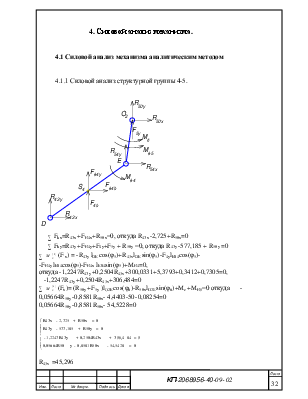
4.1.1 Силовой анализ структурной группы 4-5.
![]() Fkx=R43x +FИ4x+R50x=0, откуда R43x -2,725+R50x=0
Fkx=R43x +FИ4x+R50x=0, откуда R43x -2,725+R50x=0
![]() Fky=R43y +FИ4y+F4y+F5y + R50y =0, откуда R43y -577,185 + R50y =0
Fky=R43y +FИ4y+F4y+F5y + R50y =0, откуда R43y -577,185 + R50y =0
![]()
![]() (F к) = -R43y lDЕ cos(φ5)+R43хlDЕ sin(φ5)-F4ylЕS4cos(φ5)-FИ4y
lЕS4cos(φ5)-FИ4x lЕS4sin(φ5 )+MИ4=0, откуда -1,2247R43y
+0,2504R43х+300,0331+5,3793+0,3412+0,7305=0,
(F к) = -R43y lDЕ cos(φ5)+R43хlDЕ sin(φ5)-F4ylЕS4cos(φ5)-FИ4y
lЕS4cos(φ5)-FИ4x lЕS4sin(φ5 )+MИ4=0, откуда -1,2247R43y
+0,2504R43х+300,0331+5,3793+0,3412+0,7305=0,
-1,2247R43y +0,2504R43х+306,484=0
![]()
![]() (Fк)= (R50y +F5y )lО2Е cos(φ6)-R50xlO2E sin(φ6)+Mc +MИ5=0 откуда 0,05664R50y -0,8581R50x-
4,4403-50 -0,08254=0
(Fк)= (R50y +F5y )lО2Е cos(φ6)-R50xlO2E sin(φ6)+Mc +MИ5=0 откуда 0,05664R50y -0,8581R50x-
4,4403-50 -0,08254=0
0,05664R50y -0,8581R50x- 54,5228=0
R43х =45,296
R43y =259,513
R50x = - 42,571
R50y = 317,672
Реакции во внутренней кинематической паре Е определяем из условия равновесия звена 5:
![]()
![]() =R50x +R54x=0 (3.10)
=R50x +R54x=0 (3.10)
![]()
![]() =
F5y + R50y+ R54y =0 (3.11)
=
F5y + R50y+ R54y =0 (3.11)
откуда R54x= -R50x= 42,571
R54y= - F5y -R50y=78,4- 317,672= -239,272
Таким образом, реакции в кинематических парах группы 4-5
пара D : R43=![]() =263,436H
=263,436H
пара Е R45= ![]() Н
Н
пара О2 R50= ![]() Н
Н
4.1.2 Силовой анализ структурной группы 2-3
R34X= -R43X= -45,296
R34Y= -R43Y= -259,513
![]() Fkx=R21x +FИ2x+R30x+ R34x
=0, откуда R21x +R30x +0,5336-45,296
= 0,
Fkx=R21x +FИ2x+R30x+ R34x
=0, откуда R21x +R30x +0,5336-45,296
= 0,
R21x +R30x -44,762 = 0
![]() Fky=R21y +F2y+ FИ2y+R30y +
R34y =0, откуда
R21y -78,4-0,1208+R30y -259,513= =0, R21y +R30y
– 338,034= 0,
Fky=R21y +F2y+ FИ2y+R30y +
R34y =0, откуда
R21y -78,4-0,1208+R30y -259,513= =0, R21y +R30y
– 338,034= 0,
![]() (Fк)= -R21y lAВ cosφ2+R21xlАВ sinφ2–(F2y+FИ2y)lBS2cosφ2+FИ2хlBS2sinφ2+MИ2 =0, откуда -0,9425R21y +0,3342R21x–(-78,4-0,1208)0,4713+0,0892+0,5738 =0
(Fк)= -R21y lAВ cosφ2+R21xlАВ sinφ2–(F2y+FИ2y)lBS2cosφ2+FИ2хlBS2sinφ2+MИ2 =0, откуда -0,9425R21y +0,3342R21x–(-78,4-0,1208)0,4713+0,0892+0,5738 =0
-0,9425R21y +0,3342R21x+37,67 =0
![]() (Fк)=-R30ylOBcos(φ3-180)+R30хl0Bsin(φ3-180)-R34ylBDcos(φ3-180)+R34хlBDsin(φ3-180)=0 откуда
(Fк)=-R30ylOBcos(φ3-180)+R30хl0Bsin(φ3-180)-R34ylBDcos(φ3-180)+R34хlBDsin(φ3-180)=0 откуда
-0,07688R30y +0,4434R30х+51,4288 -51,771=0
-0,07688R30y +0,4434R30х-0,3422=0
R21x =-8,194 H
R21y =37,063 H
R30х =52,956 H
R30y =300,971 Н
Реакция во внутренней кинематической паре определяется из условия равновесия звена 3
![]() =R32x +R30х+R34x
=0, откуда
=R32x +R30х+R34x
=0, откуда
R32x +52,956-45,296 =0, R32x = -7,66 H
![]() =R32y + R30y + R34y =0, откуда
=R32y + R30y + R34y =0, откуда
R32y + 300,971 -259,513 =0, R32y =-41,458 H
Таким образом, реакции в кинематических парах группы 2 - 3:
пара А: R21= ![]() Н
Н
параВ: R23= ![]() Н
Н
параО: R30= ![]() Н
Н
4.1.3 Силовое исследование начального звена
R12x= -R21x = 8,194 H; R12y= - R21y=-37,063 H
Условия равновесия начального звена
![]() M01 (F к)
=R12х× l01А ×sin(360-φ1) + R12y
×l01А×cos(360-φ1) + My=0
M01 (F к)
=R12х× l01А ×sin(360-φ1) + R12y
×l01А×cos(360-φ1) + My=0
![]() Fкх = R10х
+ R12х=0
Fкх = R10х
+ R12х=0
![]() Fку = R10y+
R12y=0
Fку = R10y+
R12y=0
R10х=-R12х= -8,194 Н
R10у= - R12у = 37,063 Н
![]() Нм-уравновешивающий
момент .
Нм-уравновешивающий
момент .
Реакция в кинематической паре О1 :
R10 =![]() Н
Н
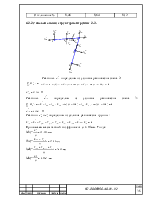
4.2.Силовой анализ механизма графическим методом
4.2.1 Силовой анализ структурной группы 4-5.
Реакцию ![]() определим из
условия равновесия звена 4:
определим из
условия равновесия звена 4:
![]() (F к) =
(F к) = ![]()
![]() Н
Н
Реакцию ![]() определим из условия
равновесия звена 5:
определим из условия
равновесия звена 5: ![]()
![]() Н
Н
Реакции ![]() и
и![]() определим
из условия равновесия группы :
определим
из условия равновесия группы :
![]()
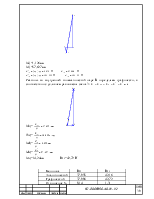
Принимаем масштабный коэффициент μ=5 Н/мм. Тогда:
(аb)=![]()
(bc)=![]()
(сd)=![]()
(de)=![]()
(af)=19,746мм
(ef)=62,73мм
![]() Н
Н
![]() =263,22
Н
=263,22
Н
![]() Н
Н
![]() Н
Н
Реакцию во внутренней
кинематической паре Е определяем графически, в соответствии с условием равновесия
звена 5: ![]()
(df)=48,92мм
F54 =244,6 H
Данные полученные в результате расчетов графическим и аналитическим методом, сводим в табл. 4.2
Таблица 4.2
Сравнительный анализ графического и аналитического расчетов
|
Величина |
R43 |
R45 |
R50 |
|
Аналитический |
263,44 |
243,03 |
320,51 |
|
Графический |
262,22 |
244,60 |
320,12 |
|
Отклонение % |
0,46 |
0,64 |
0,12 |
4.2.2 Силовой анализ структурной группы 2-3.
Реакцию ![]() определим
из условия равновесия звена 2:
определим
из условия равновесия звена 2:
![]()
![]()
![]() Н
Н
Реакцию ![]() определим из условия
равновесия звена 3:
определим из условия
равновесия звена 3: ![]()
![]() Н
Н
Реакции ![]() и
и![]() определим
из условия равновесия группы :
определим
из условия равновесия группы :
![]()
Принимаем масштабный коэффициент μ=3 Н/мм. Тогда:
(аb)=![]()
(bc)=![]()
(сd)=![]()
(de)=![]()
![]()
(af)=1,126мм
(ef)=87,627мм
![]() Н
Н
![]() Н
Н
![]() Н
Н
![]() Н
Н
Реакцию во внутренней
кинематической паре B определяем графически, в соответствии
с условием равновесия звена 3: ![]()
(ab)= ![]()
(bc)= ![]()
(cd)= ![]()
(de)= ![]()
(ea)=14,24мм R23=42,72 H
|
Величина |
R21 |
R23 |
|
Аналитический |
37,958 |
42,16 |
|
Графический |
37,906 |
42,72 |
|
Отклонение % |
0,14 |
1,31 |
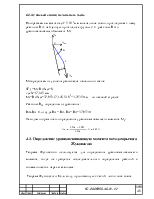
4.2.3.Силовой анализ начального звена
Изображаем в масштабе μl= 5×10-3 м/мм начальное звено, прикладывая к нему реакцию R 12, найденную при анализе группы 2-3 , реакцию R10 и уравновешивающий момент Му
Муопределяем из условия равновесия начального звена:
(Fk) = Му-R12 h μl=0, где h=17,145 мм
Му= R12 h μl=37,953×17,145×5×10-3=3,2535 Н×м – по часовой стрелке
Реакцию R10 определим из уравнения :
R12+R10=0, откуда R10 =-R12, R10= R12=37,953 Н
Находим погрешность определения уравновешивающего момента Му :
![]()
4.3. Определение уравновешивающего момента методом рычага
Жуковского
Теорема Жуковского используется для определения уравновешивающего момента, когда не требуется последовательного определения реакций в кинематических парах механизма.
Теорема Жуковского: Если силу, приложенную к какой- либо точке звена механизма, перенести параллельно самой себе в одноименную точку повернутого плана скоростей, то момент этой силы относительно полюса плана скоростей будет пропорционален ее мощности, т. е.
МР(Fi)=Pi , где МР- момент силы Fi относительно полюса плана скоростей, Pi- мощность силы Fi.
Так как сумма мощностей всех внешних сил и сил инерции звеньев, приложенных к механизму равна нулю, то уравнение равносильно:
åМР(Fi)+åМР(Fи)=0
Составим и решим уравнение. Строим повернутый на 90° план скоростей механизма, к которому в соответствующих точках прикладываем заданные силы и силы инерции.
Моменты инерции Ми2 Ми4 Ми5 заменяем парами сил
Fи2 Fи2', Fи4 Fи4', Fи5 Fи5' соответственно, которые прикладываем перпендикулярно отрезкам АВ, DE, EO2 в кинематических парах А,В,D, Е, О2. Модули этих сил определятся:
F/с=Мс/lО2Е=50/0,86=58,1395 H
F/и2=Ми2/lАВ=0,5738/1=0,5738 H
F/и4=Ми4/lDE=0,7305/1,25=0,5844 H
F/и5=Ми5/lО2Е=0,08254/0,86=0,09598 H
Все силы переносим в одноименную точку плана скоростей без изменения ее направления. В точке b плана скоростей прикладываем неизвестную уравновешивающую силу Fy.
Записываем уравнение моментов сил относительно полюса плана скоростей:

Зная величину Fy, найдем уравновешивающий момент M/ y
M/ y=Fy×lAB=12,884*0,25=3,221 Н×м
Отклонение найденного с помощью рычага Жуковского значения момента M/ y от определенного выше аналитическим методом определится:
![]()
это меньше допускаемого для инженерных расчетов значения
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.