Структурный анализ механизма.
2.1 Рисуем структурную схему станка.
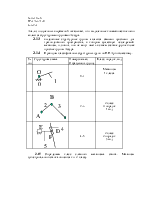
2.2 Проведем классификацию кинематических пар механизмов, результаты занесем в таблицу 1.
|
№ |
№ звеньев образующих пару |
Условное обозначение |
Наименование пары |
подвижность |
|
1 |
0-1 |
Вращательная |
1 |
|
|
2 |
1-2 |
Вращательная |
1 |
|
|
3 |
2-3 |
вращательная |
1 |
|
|
4 |
3-0 |
вращательная |
1 |
|
|
5 |
3-4 |
поступательное |
1 |
|
|
6 |
4-5 |
Вращательное |
1 |
|
|
7 |
5-0 |
поступательное |
1 |
Исследуемый механизм состоит только из одноподвижных кинематических пар (p1 = 7, р = 7), где p1 – число одноподвижных кинематических пар в механизме, р – общее число кинематических пар в механизме. Определим вид реализуемого в паре замыкания и вид контакта элементов кинематических пар (высшее – низшее). Результаты занесем в таблицу 2.
|
№ кинематической пары |
Вид замыкания |
Вид контактаВысший/низший |
|
1 |
Геометрическое |
Низшая |
|
2 |
Геометрическое |
Низшая |
|
3 |
Геометрическое |
Низшая |
|
4 |
Геометрическое |
Низшая |
|
5 |
Геометрическое |
Низшая |
|
6 |
Геометрическое |
Низшая |
|
7 |
Геометрическое |
Низшая |
2.3 Классифицируем звенья механизма.
|
№ |
№ звена |
Условное обозначение |
Название |
Движение |
Число вершин ( t ) |
|
1 |
0 |
Стойка |
— |
— |
|
|
2 |
1 |
Кривошип |
вращательное |
2 |
|
|
3 |
2 |
Шатун |
Сложное |
2 |
|
|
4 |
3 |
Коромысло |
Вращательное |
3 |
|
|
5 |
4 |
Камень |
Сложное |
2 |
|
|
6 |
5 |
толкатель |
поступательное |
2 |
Механизм имеет: четыре (n2 = 4) двухвершинных (t = 2) линейных звена 1,2,4,5; одно ( n3 = 1) трехвершинное (t = 3) звено 3, которое является базовым (Т = 3); пять (n = 5) подвижных звеньев.
2.4 Находим число присоединений к стойке. Механизм зубострогального станка имеет три (S = 3) присоединения к стойке.
2.5 Выделяем в станке простые, элементарные и с разомкнутыми цепями механизмы. В исследуемом сложном механизме можно выделить один элементарный механизм и два простых, один из которых является кулисным механизмом, а второй кривошипно-ползунным механизмом. Механизмов с разомкнутыми кинематическими цепями в исследуемом зубострогальном станке нет.
2.6 Выявляем простые стационарные и подвижные механизмы. Механизм имеет в своём составе только простые стационарные механизмы. Выявляем звенья закрепления и присоединения. В исследуемом механизме зубострогального станка звеньев закрепления нет. У него есть только одно звено присоединения - звено 3 (кулиса). Звено 3 одновременно входит в два простых механизма - кулисный и кривошипно-ползунный. Значит, для этого звена К3 = 2.
2.7 Классифицируем механизмы станка. Исследуемый механизм имеет постоянную структуру, является сложным и однотипным. Он состоит из одного элементарного механизма и двух стационарных простых, которые имеют в своём составе только замкнутые кинематические цепи.
2.8 Определяем подвижность простых механизмов станка. Анализ движений звеньев механизма показывает , что исследуемые простые механизмы , и сам сложный механизм существуют в трех подвижном (П=3) пространстве, в котором разрешены следующие простейшие независимые движения: два поступательных X и Y вдоль соответствующих осей; одно вращательное jz вокруг оси Z. Формулы для определения подвижности механизмов имеют вид
П-1
W=Пn- S (П-1)pi ;
i=1
П-1
W= S ipi-k П ;
i=1
для этого механизма формулы примут вид:
W = 3n-2p1 -p2, где
W=p1+2p2 –3k;
k=p-n.
n – число подвижных звеньев;
p1 – число кинематических пар 5-го класса;
p2 – число кинематических пар 4-го класса;
Определим подвижность кулисного механизма. Этот механизм имеет три (n=3) подвижных звена 1,2,3 и четыре (p1=p=4) одноподвижных кинематические пары О1,О2 ,А, А¢. Тогда его подвижность определится:
n = 3; p1 = 4; p2 = 0; тогда
W = 3*3-2*4-0 = 1.
k = 4-3 = 1
W = 4+2*0-3*1 = 1
Найдем подвижность кривошипно-ползунного механизма. Кривошипно-ползунный механизм имеет: три (n=3) подвижных звена 3,4,5 и четыре (p1=p=4) кинематические пары D, С, В, К. Так как кривошипно-ползунный механизм по количественному и качественному составу кинематических пар и звеньев ничем не отличается от кулисного механизма, то его подвижность определяется по тем же формулам и так же равна единице (Wкп=1) .
2.9 Подвижность механизмов с незамкнутыми кинематическими цепями. Так как в станке нет механизмов с незамкнутыми кинематическими цепями, то нет необходимости определять их подвижность.
2.10 Определяем подвижность сложного механизма. Подвижность сложного механизма поперечно-строгального станка определяется по формуле:
Wсм=Wк+Wкп-(K3-1).
Подставив численные значения, в результате получим:
Wсм=1+1-(2-1)=1
Так как исследуемый сложный механизм является однотипным, его подвижность также можно определять по формулам:
Подставив в эти формулы исходные данные ( n = 5, p = p1= 7) , найдем подвижность этого сложного механизма
W см = 3n-2p1 -p 2
W см = p1 +2p 2 -3k
k= p-n
Подставим в формулы исходные данные, получим:
W см =3×5-2×7=1
W см = 7-3×(7-5)=1
k=7-5
Видно, что полученные результаты совпадают.
2.11 Проверим соответствует ли исследуемый механизм структурной математической модели. Механизм имеет семь (p=7) одноподвижных (p1=7) кинематических пар , пять (n=5) подвижных звеньев, из которых одно (n3 =1)базовое (T=3) трёх вершинное и четыре (n2=4) двух вершинных (t=2) звена, три присоединения к стойке (S=3). Подставим в формулы
7=0.5(2×4+3×1+3)=7 7=0.5(2×4+3×1+3)=7
5=1+4=5 5=1+4=5
1=7-2×3=1 1=7-2×3=1
k=7-5=2
7=7
2.11 Выделим механизм первого класса. В соответствии И.И. Артоболевского, механизм первого класса для исследуемого механизма совпадает с элементарным механизмом.
2.12 Группы Ассура. В механизме зубострогального станка можно выделить следующие две структурные группы:
Каждая ,из структурных групп имеет два подвижных звена(n¢=n¢2 =2).звенья двух вершинные (t=2) и три одноподвижные (p=p1=3) кинематические
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.