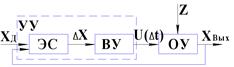
В
составе устр. управления вычислительное устройство выполняет функцию вычисления
управляющего воздействия ![]() по величине
отклонения
по величине
отклонения ![]() .
.
В
разных системах одному и тому же отклонению соответствует разное управляющее
воздействие. Правило, по которому отклонение ставится в соответствие
управляющему воздействию называется законом регулирования. ![]()
Законы регулирования получили название по характеру математической зависимости:
1.
Пропорциональный закон ![]()
2.
Дифференциальный закон ![]()
3.
Интегральный закон ![]()
4.
Пропорционально-интегральный ![]()
5.
Пропорционально-дифференциальный ![]()
6.
Пропорционально-интегрально-дифференциальный
![]()
Линейные системы уравнений
В ТАУ при изучении систем занимаются математическим описанием с помощью формул и графиков. Для сложной системы составить уравнение бывает достаточно трудно, а иногда невозможно. Поэтому для упрощения системы делят на структурные единицы. Иногда каждая структурная единица является сложным узлом на уровне систем. В этом случае каждый узел системы дробится на более мелкие до такого предела, когда полученная часть описывается простейшей мат. зависимостью. Простейшую часть называют звеном системы. Звено системы должно обладать свойством направленности. При этом сигнал в звеньях может передаваться только в одном направлении со входа на выход.
При таком свойстве влияние последующего звена на предыдущее исключается. После таки упрощений составить уравнение всей системы незатруднительно. Уравнение звеньев вместе с функциональной структурной схемой называется математической моделью системы.
Статические характеристики звеньев САУ
Поведение сист. определяется поведением составляющих их звеньев. Звено – это условно выделенная часть, функционирующая по определенному алгоритму.
Связь – это условно выделенная часть системы, автоматически отражающая направления взаимодействия между звеньями. Точка приложения входной координаты – вход звена, точка приложения выходной координаты – выход. Функциональная зависимость установившихся значений входных и выходных координат называется статической характеристикой звена. По виду статические характеристики могут быть простые и сложные, линейные и нелинейные, релейные и дискретные.
Статические звенья – звенья у которых функциональная связь между входной и выходной координатами в рабочей области непрерывна и монотонна, т.е. каждому значению x соответствует значение y.

Если при этом статическая характеристика линейна или достаточно точно может быть аппроксимирована прямой, то такое звено линейно.
Астатические звенья –
звенья у которых при отсутствии функциональной связи между входной и выходной
координатами в статич. режиме имеется функциональная связь между входной
координатой и изменениями выходной ![]() .
.
Порядок производной функциональной зависимости определяет порядок астатизма звена. Выходными координатами звена могут быть разные ф. вел., которые влияют на порядок астатизма звена.
Например:
Рассмотрим астатическое звено n-ого порядка в виде перемещения S.
![]()
Если
выходную координату примем в виде скорости, то астатизм звена понизится до
первой степени ![]() . Если выходную координату
примем в виде ускорения, то астатическое звено станет статическим
. Если выходную координату
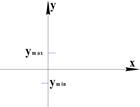
примем в виде ускорения, то астатическое звено станет статическим ![]() . Особое значение имеют звенья, у
которых в статической характеристике присутствует вертикальный участок
. Особое значение имеют звенья, у
которых в статической характеристике присутствует вертикальный участок
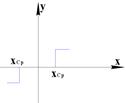
 , где
, где ![]() -
срабатывание при котором происходит скачкообразное изменение выходной величины.
-
срабатывание при котором происходит скачкообразное изменение выходной величины.
Такие звенья называются релейными и относятся к нелинейным, т.к. параметру срабатывания соответствует бесконечно большое число выходных величин.
Виды автоматического управления
1. Задачи или системы стабилизации
В таких системах задатчик должен формировать только одно заданное значение, поэтому его конструкция упрощается. В некоторых случаях задатчик как отдельный элемент может отсутствовать, а заданное значение формироваться в самом устройстве управления (УУ).
Предположим, что возмущающее воздействие временно отсутствует, а управляемая величина зависит только от управл. воздействия и эта зависимость прямопропорциональна.
![]() - управляемая величина
- управляемая величина
![]() - управляющая величина
- управляющая величина
![]() , при z=0 (1)
, при z=0 (1)
Коэффициент
передачи управляющего воздействия в управляемую величину ![]()
Для
определения будем считать, что вычислительное устройство является регулятором,
т.е. формирует управление пропорционально отклонению ![]()
В
свою очередь отклонение формируется элементом сравнения ![]() .
.
![]() ;
; ![]() ,
при z=0.
,
при z=0.
При
![]() ,
, ![]() ,
где
,
где ![]() - коэффициент отклонения передачи
регулятором отклонения в управляемую величину.
- коэффициент отклонения передачи
регулятором отклонения в управляемую величину.
 , где
, где ![]() ,
, ![]() ,
, ![]() ,
, ![]() - константы.
- константы.
![]() , т.е. управляемая координата зависит
только от возмущения. Т.о. можно записать следующую зависимость и получить
задачу стабилизации.
, т.е. управляемая координата зависит
только от возмущения. Т.о. можно записать следующую зависимость и получить
задачу стабилизации.
![]() , если
, если
![]()
 ,
то
,
то ![]() , что нам и необходимо.
, что нам и необходимо.
Выводы по системам стабилизации.
1.
Стабилизация не может выполняться
абсолютно точно, она выполняется с ошибкой ![]() .
.
2.
Погрешность стабилизации ![]() зависит от возмущения и уменьшается
при увеличении коэффициента передачи регулятора.
зависит от возмущения и уменьшается
при увеличении коэффициента передачи регулятора.
Классификация САУ

В зависимости от вида используемой информации системы бывают разомкнутые и замкнутые.
В разомкнутых системах выходная величина не изменяется, т.е. нет контроля за состоянием объекта. Возможно, разомкнутые системы, в которых УУ получает информацию только об одном задающем воздействии или одном возмущении или оба сигнала одновременно. В первом варианте разомкнутая система управления осуществляется по заданному воздействию, т.е. поступающие команды Х проводят путем изменения управл. воздействия Z последующее изменение выходной величины Y. Точность между X и Y целиком определяется постоянством параметров и возмущение никак не контролируется. Такие системы пригодны при достаточно высокой стабильности условий работы и невысоких требованиях точности. Вторым вариантом разомкнутых систем является системы с управлением по возмущению. Идеальной системой является система, когда управление – функция двух величин X и F. Возможность компенсации возмущающих воздействий позволяет повысить точность управления в системах. Разомкнутая система нашла применение только при невысоких требованиях точности.
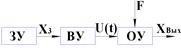
З – задающее устройство
ВУ – вычислительное устройство
F – возмущающее воздействие
В замкнутых системах на вход УУ подаётся как входная, так и выходная величина.
![]()
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.