Область средних частот определяет пропускание средних частот и отвечает за качество системы. Построим ЛАЧХ корректирующего устройства, путем вычитания располагаемой ЛАЧХ из желаемой ЛАЧХ:
Lк.у.(ω) = Lж(ω) – Lр(ω)
По виду логарифмической характеристики определяем передаточную функцию последовательного корректирующего устройства:

По виду логарифмической характеристики определяем передаточную функцию разомкнутой системы скорректированной САУ:

 |
|||
Структурная схема желаемой САУ (с параллельной коррекцией)
Корректирующее звено мы размещаем после возмущения для того, чтобы улучшить качества системы, чтобы система удовлетворяла требуемым параметрам.
5. Анализ качества скорректированной САУ
Передаточная функция разомкнутой системы (скорректированной)

Главная передаточная функция замкнутой системы (скорректированной)

Передаточная функция по возмущающему воздействию скорректированной системы:


ЛАЧХ и ЛФЧХ скорректированной САУ
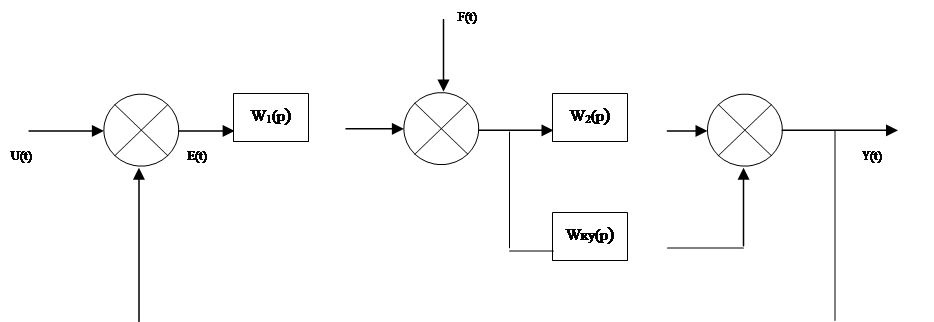
Главная передаточная функция замкнутой скорректированной системы
Время переходного процесса tp =17,3с
Перерегулирование σ =13,6%
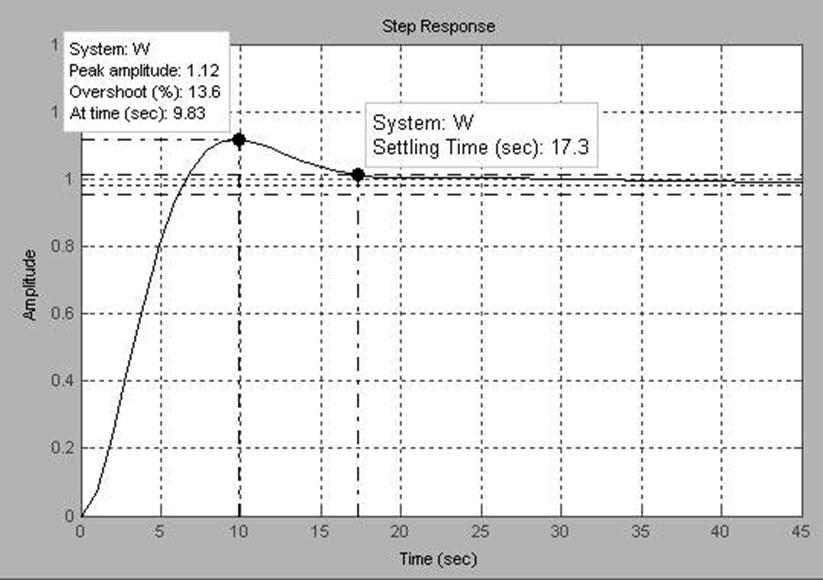
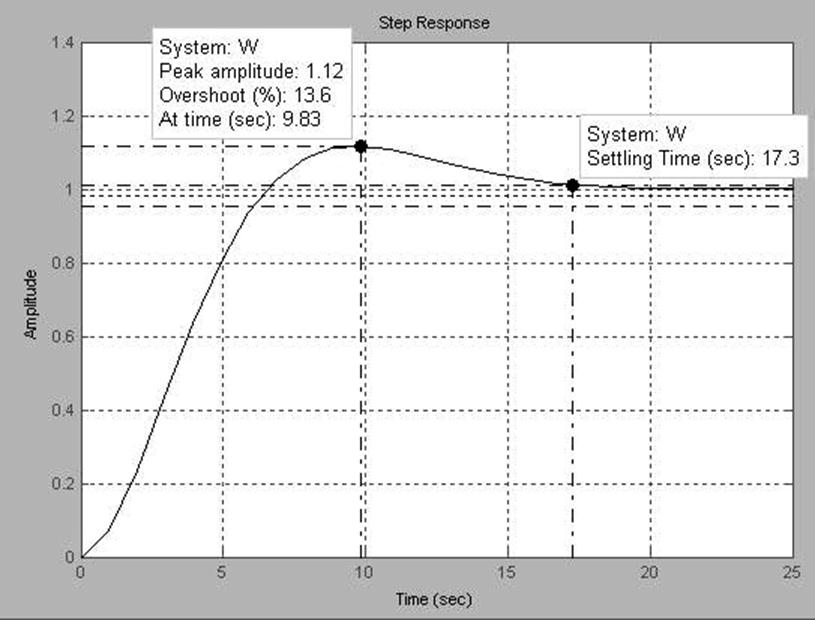
График переходного процесса по возмущению скорректированной системы
Время переходного процесса tp =17.3 с
По графику переходного процесса по возмущению видно, что он соответствует графику переходного процесса главной передаточной функции, откуда следует, что система устойчива к возбуждениям.
Анализируя главную передаточную функцию замкнутой системы F(p), получили следующие характеристики:
- время регулирования tр = 17.3 с
- Величина перерегулирования: σ = 13.6 %
Определим запасы по фазе и амплитуде исходной САУ, используя ЛАЧХ и ЛФЧХ скорректированной системы.
Для нормальной работы САУ требуется DL(w) = 16 - 20 дБ, Dj(w) > 400.
Запас по амплитуде обеспечен, по фазе Dj(w)=1120.
Все данные заносим в таблицу.
|
САУ/Параметры |
tр , с |
σ, % |
Dj, град |
DL, дБ |
|
Желаемая |
22 |
14 |
>40 |
16…20 |
|
Экспериментальная |
17.3 |
13.6 |
112 |
обеспечен |
Из анализа переходных характеристик скорректированной системы автоматического регулирования видно, что время регулирования, величина перерегулирования и запасы по фазе и по амплитуде соответствуют, что удовлетворяет заданному качеству системы.
Передаточная функция по ошибке исходной системы:


Значение ошибки в установившемся режиме: e = 1/Kи=1/17=0.059
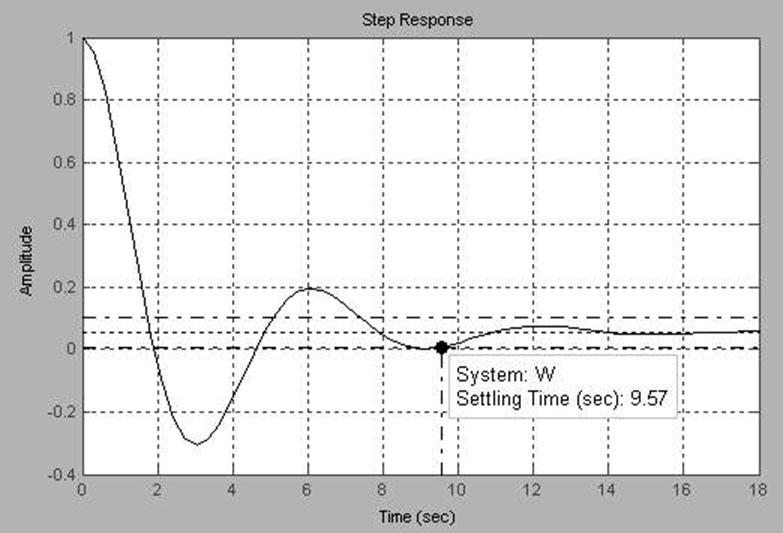
Передаточная функция по ошибке исходной системы.
Время переходного процесса tp =9.57 с
Передаточная функция по ошибке скорректированной системы:


Значение ошибки в установившемся режиме: e = 1/Kж=1/57=0.018
Анализируя передаточную функцию по ошибке Qж(p) скорректированной САУ, мы добились требуемой точности САУ.
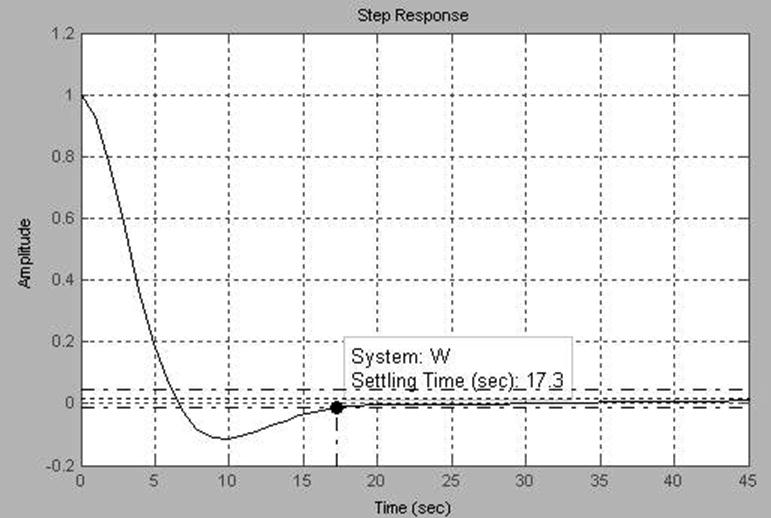
Передаточная функция по ошибке скорректированной системы
Время переходного процесса tp =17.3 с
Мы добились требуемой точности за счет увеличения коэффициента усиления посредством введения в систему регулирования усилителей. Повышение точности за счет увеличения коэффициента усиления объясняется тем, что коэффициент усиления разомкнутой цепи входит в качестве делителя во все коэффициенты ошибок.
7. Расчёт параметров корректирующих устройств
Следующим этапом расчета синтеза САУ является определение схемы корректирующего устройства. Передаточную функцию корректирующего устройства разбивают на стандартные звенья, которые выбираются из таблиц, где приводятся схемы и характеристики данных корректирующих устройств.
Разобьем полученную передаточную функцию корректирующего устройства на типовые звенья и рассчитаем для них параметры R, С цепей.
Предварительно приняв zист=100 Ом, w=wср=0.286. Звенья выбираем из таблиц (6, стр. 91).
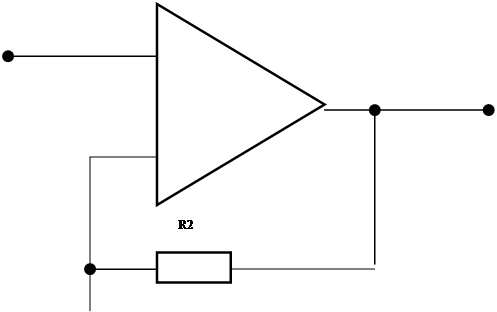
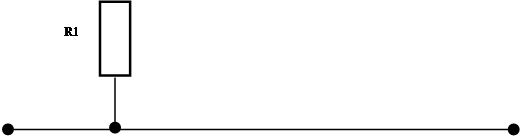
1. Усилительное звено - Ку
Для усиления поставим операционный усилитель, который не требует согласования импедансов, тогда
Ку = 1+R1/R2=3.4
Зададимся R1=100 Ом
R2=R1*Ку-1=100*3.4-1=339 Ом
 |
||
 |
||
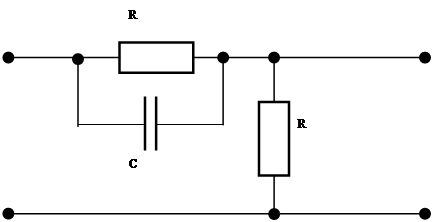
2. Пассивное дифференцирующее звено
Zвх=10Zист=1000 Ом


Решив уравнения получим: С1=0.01 Ф, R2=1168 Ом, R1=2170 Ом
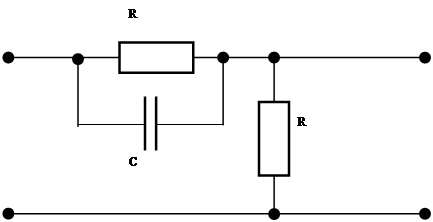 |
3. Пассивное дифференцирующее звено
Zвх=Zвых=552 Ом

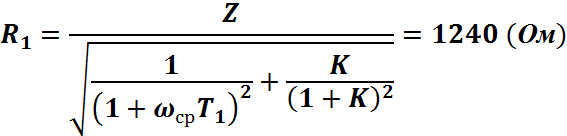

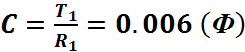
Решив уравнения получим: С1=0.006 Ф, R2=183 Ом, R1=1240 Ом
|
4. Пассивное дифференцирующее звено
Zвх=Zвых=144 Ом



Решив уравнения получим: С1=0.0011 Ф, R2=3560 Ом, R1=178 Ом
 |
Соединим все рассчитанные активные элементы в одну цепь, получим корректирующее устройство по заданной передаточной функции:
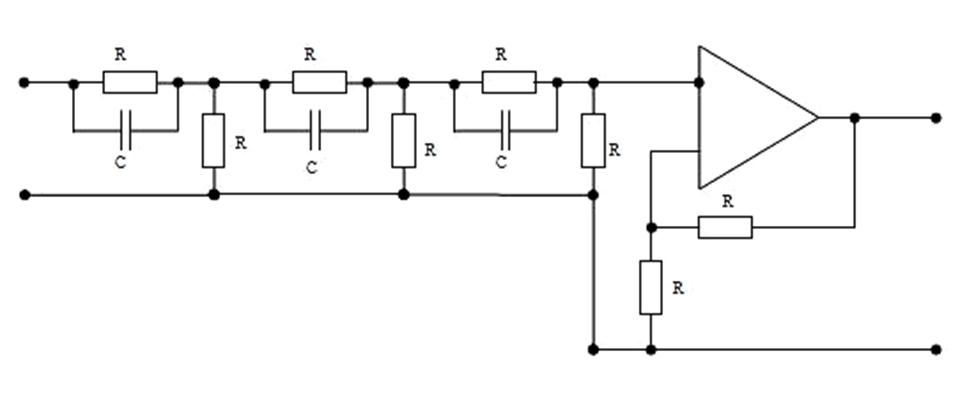
Электрическая схема корректирующего устройства.
Цель, поставленная перед нами, в курсовом проекте достигнута.
В ходе выполнения курсовой работы было получено дифференциальное уравнение и передаточная функция объекта управления и его кривая разгона, исследована устойчивость САУ. Так как система не удовлетворяла заданным показателям качества, был проведен синтез системы методом ЛАЧХ, задачей которого было подобрать параллельное корректирующее устройство, при котором система удовлетворяла заданным требованиям к ее качеству.
В результате коррекции:
· показатели качества скорректированной САУ (время регулирования tp, величина перерегулирования σ) практически совпали с желаемыми;
· полученные запасы по амплитуде и по фазе удовлетворяют требованиям, предъявляемым к САУ по устойчивости;
· точность системы увеличилась.
Т.о. спроектированная система удовлетворяет всем заданным требованиям
1. Методические указания для студентов специальности Т. 11.03 "Автоматизация технологических процессов и производств" (Кузьмин Б.П., Иванова И.Д., Волынская Е.Д) Могилев, ротапринт МТИ, 2000г.
2. Воронов А.А. 'Теория автоматического управления", Москва, "Высшая школа", 1977г.
3. Попов Е.П. "Теория линейных систем автоматического регулирования и управления", М. : Наука, 1989г.
4. Голубятников В.С. "Автоматизация технологических процессов химических производств", М., 1993г.
5. Соломенцев Ю.М. 'Теория автоматического управления" М, 1999г.
6. Бесекерский В. А. "Теория систем автоматического регулирования и управления", М. : Наука, 1975г.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.