
ГЛАВА 1.
ОПРЕДЕЛЕНИЕ И СТРУКТУРА ЗАДАЧИ ИДЕНТИФИКАЦИИ СУ
Задача идентификации является основополагающей в теории и практике автоматического управления, главным инструментальным средством большинства задач, использующих системные представления: инженерно-научные и технические исследования, экология, биология и многие другие области практической деятельности.
![]() Определение
Определение
Идентификацией динамических объектов называют определение их структуры параметров по наблюдаемым данным.
Математическая модель формируется в результате обработки соответствующих экспериментальных данных, связанных с входными и выходными сигналами идентифицируемого объекта.
Понятие динамического объекта понимается в самом широком смысле слова : любое техническое устройство, как объект управления системы автоматического управления различными объектами (временной ряд), временная последовательность, представляющая выходные данные объекта исследования и т. д. При формировании и выборе метода решения задачи большое значение имеет объем априорной информации об объекте и цель идентификации. Идентификация может производиться в целях автоматического управления объектами, адаптивного управления, прогнозирования характеристик объекта, контроля, диагностики, принятия решений и т. д. Во всех случаях, однако, цель идентификации определяет необходимую степень уменьшения информационной неопределенности, содержащуюся в априорных данных об объекте идентификации, т. е. глубину идентификации.
Задача идентификации содержит следующие основные компоненты, определяющие ее структуру:
1. Класс моделей аппроксимации объекта;
2. Характер и свойства наблюдаемых данных;
3. Критерий близости (подобия) объекта и его модели;
4. Вычислительный метод решения задачи;
5. Оценка адекватности объекта и полученной модели.
Расшифруем более подробно перечисленные компоненты.
Выбор класса аппроксимирующих моделей целиком зависит от объема априорной информации об объекте идентификации. Если априорные данные основаны на известных физических закономерностях, то практически всегда структура математической модели оказывается известной, вся неопределенность об объекте заложена в векторе неизвестных параметров объекта. Задача идентификации в этом случае состоит в оценивании вектора неизвестных параметров по результатом наблюдений над входными и выходными процессами – задача “серого ящика”, или идентификация в узком смысле (параметрическая идентификация). В решении задачи может быть использован богатый арсенал процедур теории оценивания.
В случае отсутствия подобного объема априорных данных выбор класса модели оказывается затруднительным (задача “чёрного ящика” или идентификация в широком смысле). Устранение структурно-параметрической неопределенности достигается последовательным решением ряда дополнительных задач:
· установление идентифицируемости модельных структур;
· оценка степени нелинейности объекта идентификации;
· выбор информативных переменных и т. д.
Традиционно можно выделить следующие информативные признаки объекта при построении модели:
1. Линейный (по динамике или параметрам) или нелинейный;
2. Одномерный или многомерный;
3. Статический или динамический;
4. Непрерывный или дискретный;
5. Детерминированный - стохастический.
Наблюдаемые данные также можно охарактеризовать в соответствии со свойствами входных воздействий:
1. Управляемые или неуправляемые;
2. Непрерывные или дискретные;
3. Детерминированные или случайные.
Если в условиях задачи имеется возможность управления входными воздействиями, можно применить при решении задачи методы планирования экспериментов, организуя на входе системы наиболее информативные воздействия (активная идентификация). В случае невозможности организации активного эксперимента, решение задачи осуществляется в режиме нормального функционирования (пассивная идентификация).
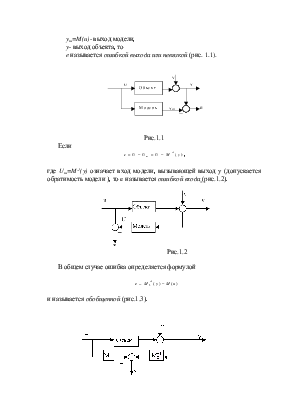
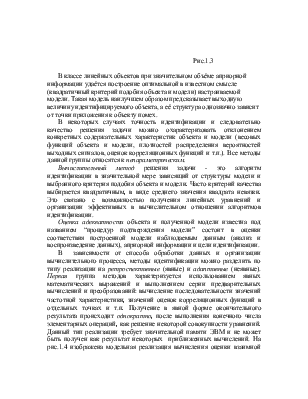
Выбор критерия подобия объекта и модели характеризует качество задачи идентификации, является мерой близости подобия объекта и модели, и представляет собой некоторый, как правило, квадратичный функционал от сигнала ошибки. Отметим традиционные методы формирования сигнала ошибки.
В случае если
![]() , где u- вход объекта и модели,
, где u- вход объекта и модели,
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.