![]() . (1.21)
. (1.21)
Физическое
истолкование поперечной индуктивности ![]() может быть дано аналогично
может быть дано аналогично ![]() . Отличие создаваемого
синхронного режима машины заключается лишь в том, что амплитуда магнитного поля
должна совпадать с поперечной осью полюсов q. В
этом случае
. Отличие создаваемого
синхронного режима машины заключается лишь в том, что амплитуда магнитного поля
должна совпадать с поперечной осью полюсов q. В
этом случае ![]() и соотношения
потокосцепления
и соотношения
потокосцепления ![]() и тока фазной обмотки
и тока фазной обмотки ![]() определяет индуктивность по
поперечной оси машины
определяет индуктивность по
поперечной оси машины
![]() .
.
Таким
образом,![]() представляет
индуктивность фазной обмотки статора при протекании по обмоткам статора
симметричных синусоидальных токов прямой последовательности, вращении ротора с
синхронной частотой и ориентации поля токов статора по поперечной оси машины.
Соответствующее сопротивление
представляет
индуктивность фазной обмотки статора при протекании по обмоткам статора
симметричных синусоидальных токов прямой последовательности, вращении ротора с
синхронной частотой и ориентации поля токов статора по поперечной оси машины.
Соответствующее сопротивление ![]() называется синхронным
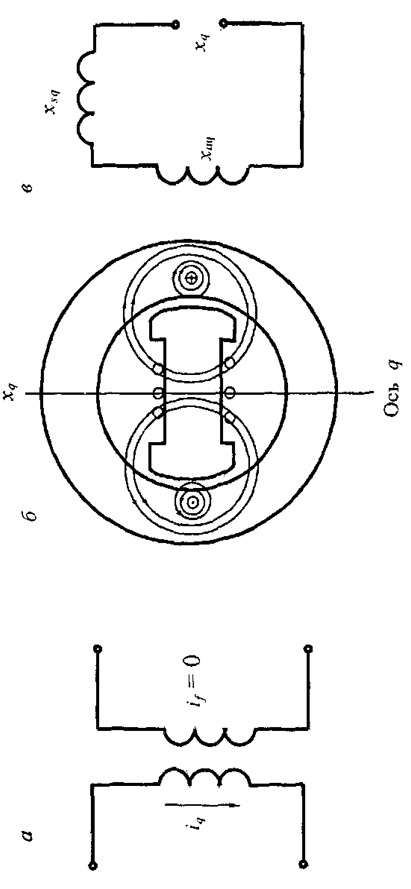
индуктивным сопротивлением по поперечной оси. На
рис. 1.9 показаны состояние обмоток машины (а) и
пути магнитных потоков (б), определяющие сопротивление обмотки статора,
равное
называется синхронным
индуктивным сопротивлением по поперечной оси. На
рис. 1.9 показаны состояние обмоток машины (а) и
пути магнитных потоков (б), определяющие сопротивление обмотки статора,
равное ![]() .
.
Если
в режиме ориентации магнитного поля по оси q (рис.
1.9) выполнить замеры фазного напряжения ![]() тока
тока ![]() синхронной машины, то можно
для данной оси определить индуктивное сопротивление
синхронной машины, то можно
для данной оси определить индуктивное сопротивление
![]() .
(1.22)
.
(1.22)
Однако
при таком методе определения ![]() и
и ![]() возникают значительные
трудности, связанные с совмещением определенных осей ротора с амплитудой
магнитного поля. Поэтому на практике используются более простые методы
определения сопротивлений
возникают значительные
трудности, связанные с совмещением определенных осей ротора с амплитудой
магнитного поля. Поэтому на практике используются более простые методы
определения сопротивлений ![]() и
и ![]() .
.
В
явнополюсной синхронной машине с несимметричным в магнитном отношении ротором ![]() и
и ![]() , что является ее характерной
особенностью, существенно отличающей ее от неявнополюсной с практически симметричным магнитопроводом ротора, для которой обычно принимается
, что является ее характерной
особенностью, существенно отличающей ее от неявнополюсной с практически симметричным магнитопроводом ротора, для которой обычно принимается
![]() (1.23)
(1.23)
|
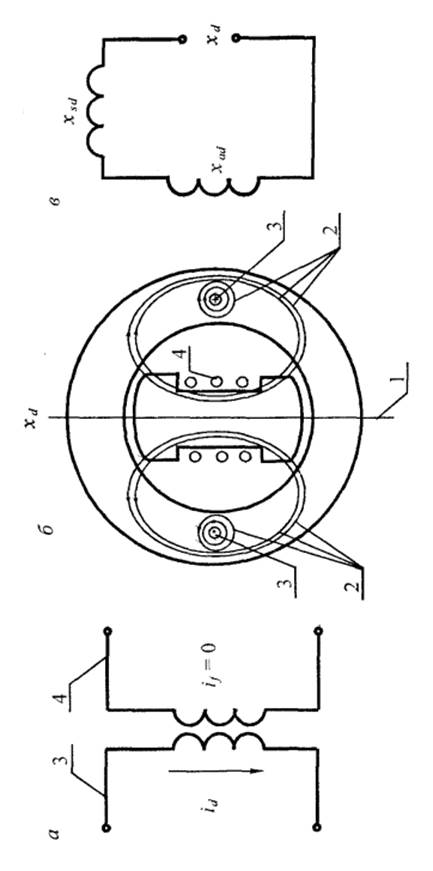
Рис. 1.8. Магнитное состояние машины, определяющее синхронное индуктивное сопротивление по продольной оси: 1 – продольная ось; 2 – магнитный
поток; 3 – обмотка статора; 4 – обмотка ротора; а
– состояние обмоток; б – пути магнитных потоков; в – схема замещения |
|
Рис. 1.9. Магнитное состояние
машины, когда обмотка статора обладает сопротивлением |
![]() – синхронное
реактивное сопротивление неявнополюсной машины, определяющее ее поведение при
любой симметричной нагрузке токами прямой последовательности.
– синхронное
реактивное сопротивление неявнополюсной машины, определяющее ее поведение при
любой симметричной нагрузке токами прямой последовательности.
Анализ
рис. 1.8, в показывает,
что синхронное индуктивное сопротивление ![]() можно
представить в виде суммы двух составляющих - одной, которая соответствует
магнитному полю рассеивания обмотки статора
можно
представить в виде суммы двух составляющих - одной, которая соответствует
магнитному полю рассеивания обмотки статора ![]() , и другой, соответствующей
магнитному полю, проходящему через зазор машины по оси d (поле
реакции якоря)
, и другой, соответствующей
магнитному полю, проходящему через зазор машины по оси d (поле
реакции якоря) ![]() .
.
Аналогично,
как видно из рис. 1.9, в, синхронное
индуктивное сопротивление ![]() можно представить в виде
суммы двух составляющих
можно представить в виде
суммы двух составляющих ![]() и
и ![]() .
.
Поскольку
практически для всех машин ![]() , то
, то
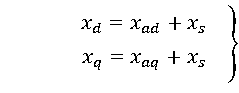 , (1.24)
, (1.24)
где ![]() – индуктивное
сопротивление рассеяния обмотки статора;
– индуктивное
сопротивление рассеяния обмотки статора;
![]() ,
, ![]() – индуктивные
сопротивления взаимоиндукции между обмотками статора и ротора соответственно по
продольной и поперечной осям.
– индуктивные
сопротивления взаимоиндукции между обмотками статора и ротора соответственно по
продольной и поперечной осям.
Полученные
уравнения позволяют представить сопротивления ![]() и
и ![]() схемами
замещения. Поскольку уравнения (1.19) потокосцеплений записаны с соблюдением
принципа взаимности в отношении индуктивностей магнитосвязанных цепей ротора и
статора, то очевидно, что
схемами
замещения. Поскольку уравнения (1.19) потокосцеплений записаны с соблюдением
принципа взаимности в отношении индуктивностей магнитосвязанных цепей ротора и
статора, то очевидно, что ![]() .
.
Это означает равенство индуктивных сопротивлений взаимоиндукции обмоток как со стороны статора, так и со стороны ротора. По аналогии собственное сопротивление ротора равно:
![]() , (1.25)
, (1.25)
где![]() – индуктивное
сопротивление рассеяния обмотки возбуждения.
– индуктивное
сопротивление рассеяния обмотки возбуждения.
Для
принимаемых обычно базисных величин сопротивлений (![]() ) и индуктивностей
) и индуктивностей ![]() ), связанных соотношением
), связанных соотношением ![]() , относительные
значения индуктивностей и соответствующих им индуктивных сопротивлений равны
друг другу (например,
, относительные
значения индуктивностей и соответствующих им индуктивных сопротивлений равны
друг другу (например, ![]() .
.
Поэтому уравнения потокосцеплений (1.19) в относительных единицах можно записать в виде:
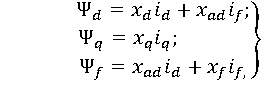 (1.26)
(1.26)
1.1.2.2. Уравнения напряжений синхронной машины
Формальная связь между действительными фазными напряжениями синхронной машины и напряжениями в осях d и q дана в уравнении (1.17).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.