Выразив токи ![]() и
и ![]() в
(1.14) через токи
в
(1.14) через токи ![]() с
помощью (1.13), получим для них ранее записанные выражения (1.12). Решая
систему уравнений (1.12) относительно
с
помощью (1.13), получим для них ранее записанные выражения (1.12). Решая
систему уравнений (1.12) относительно ![]() получим
формулы определения фазных токов машины при известных токах
получим
формулы определения фазных токов машины при известных токах ![]() и
и ![]() :
:
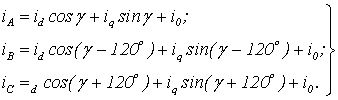 (1.15)
(1.15)
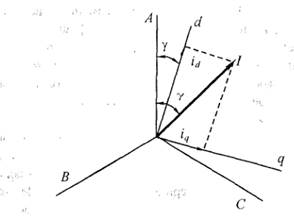
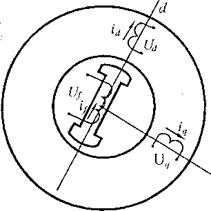
Рис. 1.5. Представление продольного и поперечного токов с помощью изображающего вектора
Геометрический смысл преобразований (1.15) легко установить из диаграммы рис. 1.6.
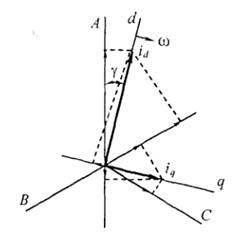
Рис.1.6. Определение мгновенных фазных токов через продольный и поперечный токи
Таким образом, в результате преобразования (1.12) можно
вместо фазных токов ![]() , заданных любыми функциями
времени, рассматривать токи
, заданных любыми функциями
времени, рассматривать токи ![]() и
и ![]() . Удобство такого перехода
заключается в том, что новые токи
. Удобство такого перехода
заключается в том, что новые токи ![]() и
и ![]() в
установившемся режиме имеют постоянные значения. Действительно, поскольку в
установившемся режиме скорость вращения ротора и вектора
в
установившемся режиме имеют постоянные значения. Действительно, поскольку в
установившемся режиме скорость вращения ротора и вектора ![]() одинакова, то угол (
одинакова, то угол (![]() ) не меняется (см. рис. 1.5).
А если (
) не меняется (см. рис. 1.5).
А если (![]() ) = const, то согласно уравнению (1.14) и токи
статора
) = const, то согласно уравнению (1.14) и токи
статора ![]() и
и ![]() в системе координат, вращающейся
вместе с ротором, являются величинами постоянными.
в системе координат, вращающейся
вместе с ротором, являются величинами постоянными.
Поясним это: иногда образно говорят, что если бы исследователь, находящийся на роторе и вращающийся вместе с ним, наблюдал процесс изменения режимных параметров в статоре, то он видел бы их значения неизменными. И наоборот, если бы в фазе статора протекал постоянный ток, то исследователь на роторе наблюдал бы гармоническое изменение величин тока.
Следует отметить, что замену действительных фазных токов
фиктивными токами ![]() и
и ![]() , определяемыми по формулам
(1.12), нельзя рассматривать только лишь как математические преобразования.
В действительности новым токам можно дать физическое обоснование. Так величину
, определяемыми по формулам
(1.12), нельзя рассматривать только лишь как математические преобразования.
В действительности новым токам можно дать физическое обоснование. Так величину ![]() можно
физически представить как мгновенное значение тока в фиктивной обмотке
статора, вращающейся со скоростью ротора, ось которой в любой момент времени
совпадает с продольной осью ротора. Значение тока в этой обмотке таково, что он
создает такую же намагничивающуюся силу по продольной оси, как три действительных
фазных тока, протекающих в реальных обмотках статора. Физическое истолкование
тока
можно
физически представить как мгновенное значение тока в фиктивной обмотке
статора, вращающейся со скоростью ротора, ось которой в любой момент времени
совпадает с продольной осью ротора. Значение тока в этой обмотке таково, что он
создает такую же намагничивающуюся силу по продольной оси, как три действительных
фазных тока, протекающих в реальных обмотках статора. Физическое истолкование
тока ![]() совершенно аналогично
совершенно аналогично ![]() . Необходимо лишь помнить,
что
. Необходимо лишь помнить,
что ![]() действует не в продольной, а
в поперечной оси.
действует не в продольной, а
в поперечной оси.
Переход
от действительных режимных параметров синхронной машины к переменным в осях d, q может быть выполнен не только для
токов, но и для других величин. Замена, например, в (1.12) переменных; ![]() на
на ![]() или
или ![]() дает соответствующие
уравнения преобразования для потокосцеплений или напряжений по осям dи q:
дает соответствующие
уравнения преобразования для потокосцеплений или напряжений по осям dи q:
 (1.16)
(1.16)
 (1.17)
(1.17)
Таким образом, переход от трех исходных осей (А, В, С) к двум (dиq) физически означает замену рассматриваемой трехфазной машины эквивалентной двухфазной, в которой магнитные оси фазных обмоток сдвинуты на 90° электрических и вращаются вместе с ротором. На рис. 1.7 схематично изображены обмотки преобразованной синхронной машины.
|
|
Рис. 1.7. Упрощенная модель синхронной машины по Парку - Гореву
1.1.2.1. Потокосцепления и сопротивления обмоток синхронной машины
Рассмотрим далее изменения, которые происходят с потокосцеплениями обмоток машин при записи их в осях d, q. Для этого в уравнения (1.16) подставим (1.4). Затем в полученные уравнения и (1.4) подставим выражения для индуктивностей (1.9-1.11) и токов (1.12). После относительно большого количества алгебраических и тригонометрических преобразований можно получить следующие выражения:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.