Введение
В настоящее время при проведении нагрузочных испытаний тепловозов используются жидкостные реостаты. Целью реостатных испытаний является регулировка электрической схемы для получения требуемых характеристик ТТ, проверка правильности и надежности ее монтажа, редукторов компрессора, пневматической аппаратуры, электрооборудования, холодильника и других механизмов и устройств, при одновременной проверке работы дизель-генераторной установки.
Проведение перечисленных выше испытаний характеризуется значительным расходом топлива, большой длительностью и неблагоприятными условиями труда.
Из анализа технологических процессов доводочно-регулировочных испытаний тепловозов в локомотивных депо в тепловозостроительных и тепловозоремонтных заводах следует, что значительную часть по настройке и диагностике неисправностей в электрических схемах, на долю которых приходится 35-40% всех отказов, можно выполнить без использования реостатных установок, в том числе и при неработающем дизеле.
Если учесть, что из-за отсутствия или большой загрузки водяных реостатов в ряде депо исключается возможность эффективного выявления нарушения технологического состояния тепловозов, которые приводят к перерасходу топлива на тягу и к преждевременному износу дизеля, то становится очевидным, что разработки более эффективных технологических процессов и технических средств на основе безнагрузочных методов имеет большое научное и практическое значение.
Метод безреостатного испытания системы возбуждения ТГ тепловоза позволяет сократить длительность этих испытаний, снизить расход дизельного топлива, как на испытаниях, так и на тягу поездов за счет поддержания оптимальных настроек дизель-генераторных установок, улучшить условия труда рабочих.
1 .Теоретическое обоснование безнагрузочного метода регулирования электрической передачи тепловоза
Основным методом регулирования электрической передачи в депо, тепловозостроительных и тепловозоремонтных заводах у нас в стране и за рубежом является метод реального нагружения тягового генератора на водяной реостат.
Для этого ТГ тепловоза отключают от тяговых двигателей (ТЭД) и подключают к нагружающему устройству для отбора мощности, в качестве которого чаще всего, используют водяной реостат. Он позволяет нагружать ТГ при максимальном напряжении 1 кВт мощностью в 5 МВт, и кратковременно реализовывать ток до 7-8 кА при напряжении 100-300 В, а так же контролировать основные параметры электрической передачи (ЭП).
В настоящее время, при испытаниях тепловозов, наибольшее распространение получили методы реального нагружения ТГ и безнагрузочные методы регулирования ЭП при работе ДГУ на холостом ходу.
Для выбора направления решения безреостатной настройки ЭП проведем сравнительную оценку их метрологических показаний.
В результате проведенного анализа метрологических показателей метода реального нагружения, было определено, что погрешности регулировки носят случайный характер и обусловлены неравномерным токораспределением реостатной установки и ЭП из-за переходных сопротивлений соединительных проводов. Контроль токораспределения осуществляется вольтметром при неочередном отключении поездных контакторов К1-К6. Согласно нагрузке на реостатные испытания допускается разность в показаниях вольтметра, которая составляет ∆n = 7%.
На точность регулировки характеристик ТГ влияют квазипериодические колебания тока и напряжения нагрузки. Эти процессы проходят при нагреве, загрязнении воды и электродов. А также при незначительных нагрузках.
Таким образом, средняя квадратичная погрешность метода реального нагружения ТГ оценивается значением:
Spn= 3,3%
Оценим метрологические показатели существующих безнагрузочных методов.
Ряд без нагрузочных методов заключается в регулировке ЭП на холостом ходу работы ДГУ, изложен в работах « Диагностика и регулирование тепловозов» и «Безреостатная диагностика тепловозных дизель-генераторов». Их сущность заключается в том, что на входе канала нагрузки ЭП подключают сигнал, имитирующий ток якоря ТЭД и контролируют ЭДС. ТГ при различных значениях имитационного тока 1Г по селективной характеристике E = f(in). Рассмотрим некоторые метрологические показатели этого метода.
Согласно функциональной схеме статистические передаточные функции звеньев определяются следующей системой уравнений: Uг=K1(I3-I4)-K2Iг (1.1);
Iтг= K3Ir(1 .2);
IТН=K4Iг(1.3);
Iy=K3IТГ+KбIтн(1.4),
где КГК3- коэффициенты пропорциональности.
Подставив значения токов из выражений (1.2)-(1.4) в (1.1) получим уравнение реального нагружения ТГ при его работе на селективной характеристике:
Ur =K1I3-K]K3K5Ir-K1K4K6Ur -КХ1Г(1.5)
При регулировании ЭП на холостом ходу безнагрузочным методом, напряжение ТГ равно ЭДС и определяемся из уравнения (1.5) при подстановке в него 1г=0. Отсюда следует:
Ег =KJ3- KYK3K5Ir - К,КАК6ЕГ(1.6)
Для определения методической погрешности метода вычитаем из уравнения (1.6) уравнение (1.5), получим:
Er-Ur=K1K4K6(Ur-Er) + K2Ir+KlK3K5(Ir-rr) (1.7)
Как видно из уравнения (1.7), при регулировании ЭП на холостом ходу ЭДС отличается от напряжения реального нагружения ТГ не только на величину падения напряжения в цепи якоря иг=к21г,а. возникает также дополнительная погрешность:
AU2= К1К4К6{Uг -Ег) + К{КгК5{1г -Гг)
Величина au2зависит от настраиваемых параметров КГК6, которые неизвестны при регулировании ЭП. Для их определения
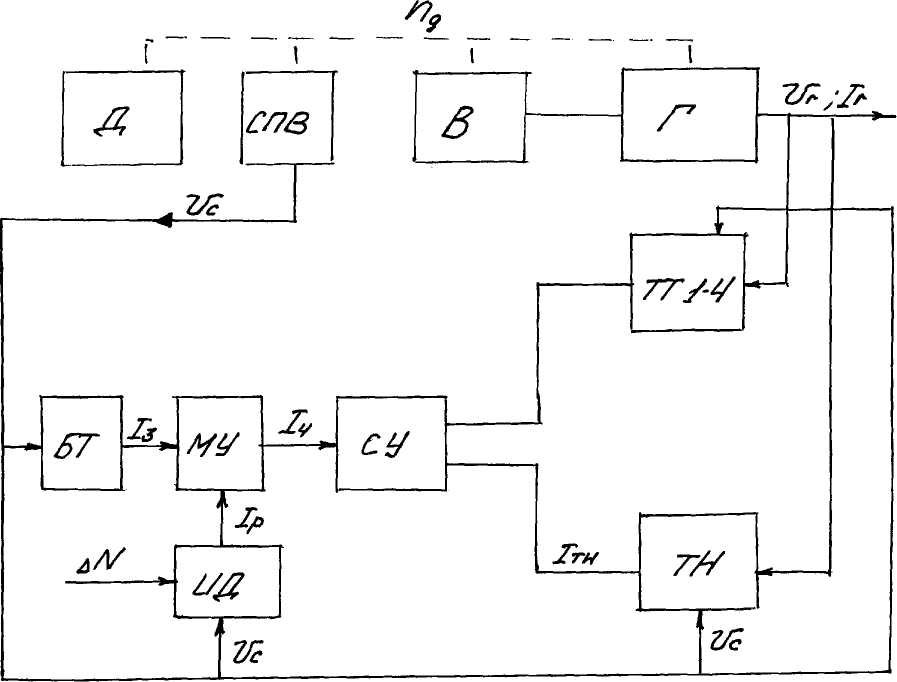
Д – дизель
Г -- тяговый генератор
В – возбудитель
СПВ – подвозбудитель
МУ – магнитный уситель
СУ – селективный узел
ТТ – датчик тока
ТН – датчик напряжения
ИД – индуктивный датчик
были исследованы суммарные характеристики МУ, В, ТГ на отрегулированных тепловозах ТЭ10М.
На экспериментальных данных таковых нагрузочных характеристик определим полное падение напряжения в цепи якоря ТГ при его работе на селективной характеристике.
Для ТГ типа ГПЗ11Б можно принять Up-Er=5-40B.
На участке, подставив все значения коэффициентов в выражение дополнительной погрешности, получим:
∆U2=20-112В
На участке селективной характеристики эта погрешность составляет 5-15%.
В этом рисунке не рассмотрено падение напряжения дс/, в цепи якоря ТГ потому, что его с высокой точностью можно оценить по нагрузочным характеристикам и учесть при регулировании ЭП.
Точность безнагрузочных методов зависит также от характеристик имитатора тока (ИТ). Известные конструкции имитаторов не позволяют воспроизвести реальные формы сигналов, в результате чего появляются погрешности имитирования тока якоря ТГу=3-4%.
В настоящее время в ПО «Луганск тепловоз» внедряется схема ЭП тепловоза ТЭ10М с включением токовой катушки реле переходов в цепь датчиков тока. Это позволяет произвести его регулировку безнагрузочным методом.
Для оценки этой погрешности принимаем что она равна погрешности имитирования тока якоря ТГ, т.е. ∆у = ∆РП=3-5%.
Исходя из приведенных расчетов, среднеквадратическая погрешность безнагрузочного метода составляет:
Из сравнительной оценки метрологических показателей существующих методов регулирования ЭП тепловоза можно сделать вывод, что реальные нагружения ТГ на водяной реостат приводит к появлению средней квадратической погрешности:
SPM=3,3%
При настройке системы возбуждения безнагрузочным методом средняя квадратическая погрешность составляет S6m=6,9%, что не превышает требуемую точность до 10% в соответствии с технологическим процессом реостатного испытания.
Таким образом, имитируя сигналы тока и напряжения ТГ с погрешностями не более 4%, можно настроить систему возбуждения ТГ безнагрузочным способом при неработающем дизеле.
Исходя из этого предполагается три способа безнагрузочной проверки и настройки системы возбуждения ТГ:
1. Безнагрузочная настройка электрооборудования тепловоза с использованием ЭВМ;
2. Метод безнагрузочной проверки и настройки системы возбуждения ТГ тепловоза;
3. Безреостатная настройка селективной системы возбуждения ТГ тепловоза.
2.Математическая модель тягового генератора
Математическая модель ТГ основана на известной зависимости для цепи якоря:
Uг=Ег-IгRг-2Uщ (2.1) где ЕГ - ЭДС генератора, В;
Rг=Rдг+Rдп - сопротивление обмоток якоря и дополнительных полюсов, Ом;
Uщ - падение напряжения на щетках, В.
Выразим ЭДС через конструкционные параметры, магнитную индуктивность в зазоре и скорость вращения:
Ег =![]() arlBsnr(2.2)
arlBsnr(2.2)
где N - число активных проводников якоря;
Р - число пар полюсов;
а- число пар параллельных ветвей обмотки якоря;
1 - расчетная длина якоря, м;
а,t- полюсное перекрытие и полюсное деление;
B6- магнитная индукция в воздушном зазоре, Тл;
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.