1) взаимное управление мощностью турбин
Эта автоматика предназначена для устранения асинхронного хода генераторов электрической станции, которая в следствии аварийных ситуаций оказалась изолированной (или имеет слабые связи) от энергосистемы. Её генераторы начинают работать асинхронно к ЭЭС. Принцип действия автоматики: выбирается электростанция, которая находится вблизи рассматриваемой, и которая в результате аварии будет работать синхронно к ЭЭС. Между этими двумя электростанциями устанавливается взаимное управление, которое в случае аварии будет взаимно управлять турбинами обоих ЭС таким образом, чтобы устранить асинхронный режим аварийной станции.
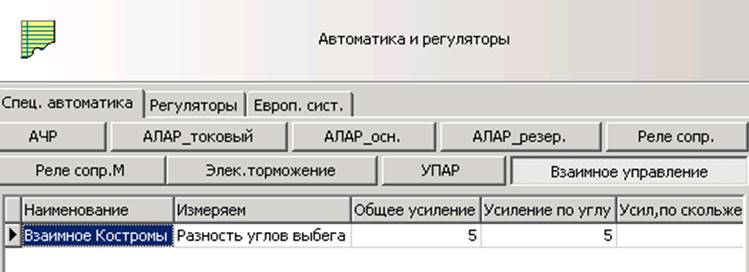
Параметры взаимного управления задаются в окне «Взаимное управление», страницы «Спец. автоматика» ветви дерева «Автоматика и регуляторы»

В окне «Задания» также выбираем «Взаимное управление мощностью турбин». Место и второе место действия – электростанции, на которых устанавливаем взаимное управление. Объектом реализации выступает автоматика – ранее введённая нами в окне «Взаимное управление».
2) электрическое торможение
Этот тип автоматики используется для предотвращения асинхронного хода генераторов ЭС, который возможен после каких-то аварийных ситуаций или после коммутаций в режимной схеме. Принцип действия устройства: после выполнения какого-либо условия – в заданном узле режимной схемы кратковременно вводятся шунты на землю, по которым накопленная механическая мощность турбин генераторов рассеивается «в землю».
Параметры электрического торможения в окне «Электрическое торможение», страницы «Спец. автоматика» ветви дерева «Автоматика и регуляторы»

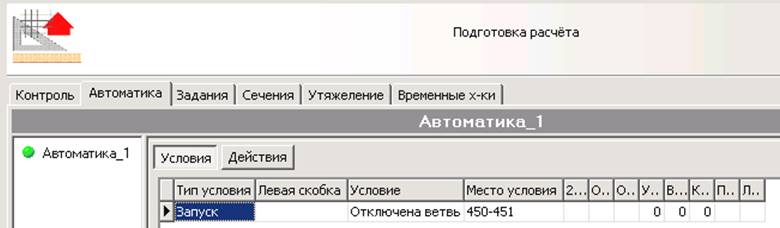
В подокне «Условия» окна «Автоматика» ветви дерева «Подготовка расчета» вводим условие, после которого должна сработать автоматика.
А в подокне «Действия» вводим место действия – название ЭС, 2-ое место – название узла. Объектом реализации выступает название автоматики, введённой в окне «Электрическое торможение».

Настройка АРВ
Настройка АРВ производится путём изменения параметров регуляторов возбуждения через ветвь дерева проекта «Автоматика и регуляторы» - «Регуляторы». Для выполнения настройки сначала необходимо ввести номер (наименование) генератора, АРВ которого настраивается. Для этого при активной ветви «Подготовка расчёта», выбираем лист «Установка параметров» и окно «Условия динамики». Выбираем из списка «Ген. настройки АРВ» и «Вариант настройки». Для синхронных генераторов используется три варианта настройки: по каналам частоты; по каналу производной напряжения; по каналу производной тока ротора
Дальше выполняем расчет переходного процесса через меню «Расчёт» - «Настройка АРВ». Правильность настройки проверяем через меню «Сервис» - «Графический анализ» при активной ветви «Подготовка расчёта».
Анализ настройки АРВ можно проводить с помощью области D-разбиения и амплитудно-частотной характеристики (АЧХ), построенной на основе предварительного расчета переходного процесса. АРВ настроено хорошо, когда точка рабочей настройки (координаты k0f, k1f) расположена по середине области D-разбиения, то есть в центре области устойчивости. Если правильность настройки оцениваем с помощью АЧХ, то нужно добиться того чтобы на характеристике были два пика приблизительно одинаковых по высоте. Если сопоставить область D-разбиения и АЧХ, то первый пик характеристики можно увеличить, передвигая точку на области D-разбиения по направлению к её началу, а второй соответственно к концу области.
Автономная настройка устройств АЛАР.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.