z=y+v (5.6.7)
где y=Hx - вектор “правильных” измерений, который имел бы место при точной модели наблюдения, и отсутствии ошибок наблюдения; тогда полагая вектор х неслучайной величиной, получим :
![]() (5.6.8)
(5.6.8)
где
![]() по
предположению.
по
предположению.
Ошибки наблюдений характеризуются ковариационной матрицей
![]()
Рассмотрим некоторые случаи:
1. ![]() - равноточные
некоррелированные наблюдения. Случай соответствует ситуации независимых
между собой измерений одинаковыми приборами. Величина
- равноточные
некоррелированные наблюдения. Случай соответствует ситуации независимых
между собой измерений одинаковыми приборами. Величина ![]() известна,
или подлежит определению.
известна,
или подлежит определению.
2.
![]() , где N - известная нормированная ковариационная матрица,
соответствует случаю равноточных, но коррелированных наблюдений.
, где N - известная нормированная ковариационная матрица,
соответствует случаю равноточных, но коррелированных наблюдений.
Полагая N=kkT, получим схему
![]() , где
, где
![]() ,
причем
,
причем ![]() .
.
Таким образом, данная схема равноточных коррелированных наблюдений заменой координат приводится к случаю 1.
3.
 -случай неравноточных некоррелированных наблюдений, приводится к случаю
2.
-случай неравноточных некоррелированных наблюдений, приводится к случаю
2.
4. Общий случай соответствует произвольной симметричной неотрицательно определённой ковариационной матрице
![]() (5.6.9)
(5.6.9)
Для оценки точности результатов необходимо знание Rz, либо задание Rv в
виде ![]() , с
последующей оценкой величины
, с
последующей оценкой величины ![]() .
.
5.6.2 Простейшие оценки МНК
Пусть
z=Hx+v , (5.6.10)
- линейная схема наблюдений где H - (m x n) – матрица наблюдений,
x - (n x 1) – вектор неизвестных параметров
z - (m x 1) – вектор результатов наблюдений
v - (m x 1) – вектор ошибок наблюдений, причём
![]() ,
(5.6.11)
,
(5.6.11)
т.е. рассматривается случай равноточных некоррелированных наблюдений.
Вектор неискаженных помехами измерений есть
![]() .
.
Если бы этот вектор был известен, то оценка вектора х имела бы вид H+z* в смысле
![]() , где
H+
- псевдообратная в смысле Мура-Пенроуза матрица.
, где
H+
- псевдообратная в смысле Мура-Пенроуза матрица.
Пытаемся искать оценку ![]() , которая объясняла бы появление в результате опыта
реализовавшееся значение вектора z, из
условия
, которая объясняла бы появление в результате опыта
реализовавшееся значение вектора z, из
условия
![]() (5.6.12)
(5.6.12)
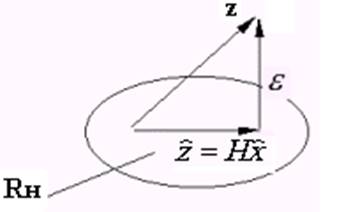
Условие (5.6.12) имеет ясный геометрический смысл: пусть
RH={Y: Hx=y}
- множество значений преобразования с матрицей Н. Тогда критерий (5.6.12) минимизирует квадрат расстояния от вектора наблюдений z до подпространства R(H). Квадрат длинны этого вектора
![]()
достигнет
минимума при том значении ![]() , при котором
, при котором ![]() перпендикулярно R(H). Другими словами, вектор
перпендикулярно R(H). Другими словами, вектор
![]()
|
Рис.5.6.2
Рис.5.8.1
Имеем
![]()
откуда
![]() (5.6.13)
(5.6.13)
Равенство (5.6.13) представляет собой условие ортогональности.
Уравнение (5.6.13) называется нормальным уравнением и всегда имеет решение, поскольку
![]() ,
,
где R(Н) – множество
значений матрицы Н, состоящее из векторов вида Нх
при ![]() .
.
Любое решение уравнения (5.6.13) имеет вид:
![]() , где
w- произвольный (n x 1) вектор.
, где
w- произвольный (n x 1) вектор.
Вектор, доставляющий решение задачи и имеющий минимальную норму равен
![]() (5.6.14)
(5.6.14)
Этот единственный вектор нормальным псевдорешением линейной системы
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.