z =
F(u, x)+v , (5.6..2) где
v - вектор ошибок наблюдения, учитывающий как
несоответствие вида функции ![]() истинному, так и объективно существующие ошибки
измерения.
истинному, так и объективно существующие ошибки
измерения.
Выражение (5.6.2) принято называть управлением наблюдения. Если функция ![]() является
линейной относительно оцениваемого вектора х, то уравнение
наблюдения в этом случае является линейным.
является
линейной относительно оцениваемого вектора х, то уравнение
наблюдения в этом случае является линейным.
В основе МНК лежит определение такого значения неизвестного параметра ![]() , которое объясняло бы появление в результате эксперимента значения
вектора z, и обеспечивало наименьшее значение суммы квадратов
невязок, т.е.
, которое объясняло бы появление в результате эксперимента значения
вектора z, и обеспечивало наименьшее значение суммы квадратов
невязок, т.е. ![]() определяется из условия минимизации по х величины
определяется из условия минимизации по х величины
I(x)=[z-F(u, x)]T[z-F(u, x)]
Решение задачи
![]()
приводит к системе уравнений
![]() , (5.6.4) которая
называется нормальной.
, (5.6.4) которая
называется нормальной.
Рассмотрим простейшие примеры получения уравнений наблюдения.
Пример 5.5
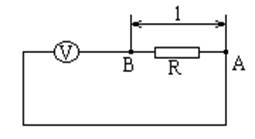
Рис.5.6.1
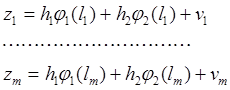
Пусть z(l) - падение напряжения между точками А и В (рис.5.6.1). В точках l1, l2, ..., lm
измеряют величины z(lk), пропорционально току цепи:
![]() , где
, где
![]() -
ошибка измерений,
-
ошибка измерений,
![]() -
удельное сопротивление проводника,
-
удельное сопротивление проводника,
j=1(1)m
или
![]() , где
, где
![]()
Таким образом, после “m” измерений имеем:
или
![]() ,
(5.6.4)
,
(5.6.4)
где ![]()
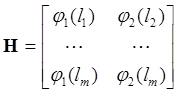 -
матрица наблюдений размером (mx2)
-
матрица наблюдений размером (mx2)
![]()
![]()
Модель вида
![]()
при отсутствии ошибок измерения является точной, поскольку получена из физических соображений. Вектор
![]()
ищется из условия
![]() , где
z -
вектор реализовавшихся измерений,
, где
z -
вектор реализовавшихся измерений,
Нх- вектор неискаженных ошибками измерений.
Пример 5.6
Пусть (xk, zk)
пары наблюдений случайных переменных, где xk - значения
“независимой” случайной величины. Построение функции регрессии E(z/x)=f(x) требует многократного измерения величины y в
каждой точке xk, что может оказаться невозможным. Поэтому
регрессионную модель строят в заданном классе функций ![]() в
виде
в
виде
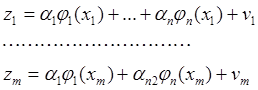 (5.6.5)
(5.6.5)
или
![]() , где
, где
![]() -
вектор измеренных значений зависимой переменной z,
-
вектор измеренных значений зависимой переменной z,
 -
матрица наблюдений размером (mxn)
-
матрица наблюдений размером (mxn)
![]() -
вектор искомых параметров,
-
вектор искомых параметров,
![]() -
вектор ошибок измерения.
-
вектор ошибок измерения.
Вектор невязок z-Hx содержит как ошибки модели, обусловленные произволом
в задании класса ![]() функций, так и ошибки собственно измерений.
Минимизация
функций, так и ошибки собственно измерений.
Минимизация ![]() по х позволяет определить такое значение
по х позволяет определить такое значение ![]() ,
которая дает наилучшую аппроксимацию в смысле наименьших квадратов зависимости f(x) в классе
,
которая дает наилучшую аппроксимацию в смысле наименьших квадратов зависимости f(x) в классе ![]() .
.
Пример 5.7
Оценка параметров сигнала. Пусть s(t) - выборочная функция
некоторой совокупности, доступная измерению в моменты времени tk, ![]() с
ошибками
с
ошибками ![]() , т.е.
, т.е.
![]() (5.6.6)
(5.6.6)
Отсутствие априорной информации о статистических характеристиках процесса s(t) приводит к заведомо неточной модели наблюдения. Модель сигнала которая
строится в виде линейной комбинации конечного набора линейно не зависимых
функций ![]() ,т.е.
,т.е.
s(tj)=x1![]() ,
,
j=1(1)m.
Уравнение наблюдения в этом случае также оказывается линейным
![]() , где
, где
![]()
![]() -
вектор наблюдений (mх1);
-
вектор наблюдений (mх1);
![]() -
матрица наблюдений, размером (mxn),
-
матрица наблюдений, размером (mxn), ![]()
![]() -вектор
ошибок, размером (mx1).
-вектор
ошибок, размером (mx1).
Решение задачи
![]()
обеспечивает
наилучшую аппроксимацию s(t) линейной комбинацией функций ![]() .
.
5.6.1 Линейная схема наблюдений
Рассмотрим линейную схему наблюдений
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.