![]()
![]() (5-4)
(5-4)
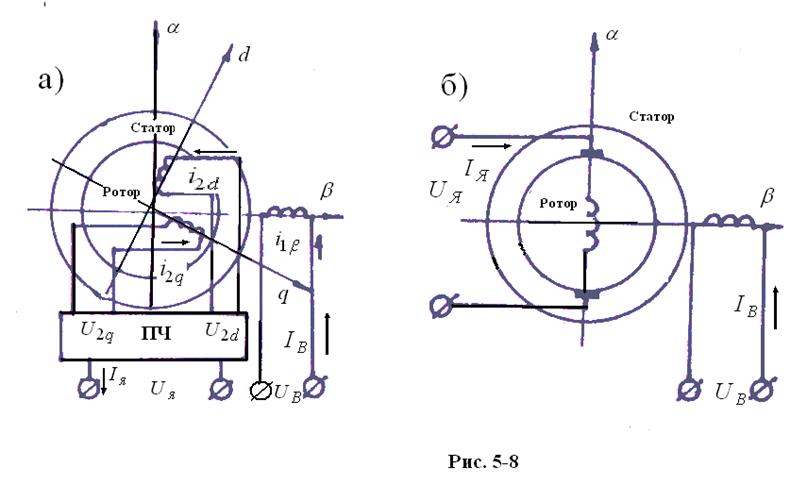
Обмотка
статора по оси ![]() есть
аналог обмотки возбуждения машины постоянного тока, а обмотки ротора по осям
2d и 2q - аналоги параллельных ветвей обмотки ротора машины постоянного тока.
есть
аналог обмотки возбуждения машины постоянного тока, а обмотки ротора по осям
2d и 2q - аналоги параллельных ветвей обмотки ротора машины постоянного тока.
Убедиться в справедливости
(5-4) можно, осуществив приведение этих токов к неподвижным осям ![]() и
и
![]() :
:
![]() ,
,
![]()
Таким образом, в осях ![]() и
и
![]() действительным
переменным токам обмоток ротора двухфазной обобщенной машины эквивалентен
ток
действительным
переменным токам обмоток ротора двухфазной обобщенной машины эквивалентен
ток ![]() ,
протекающий по единственной роторной обмотке машины постоянного тока (по двум
её параллельным ветвям) и создающий поле, неподвижное в пространстве и
направленное вдоль оси
,
протекающий по единственной роторной обмотке машины постоянного тока (по двум
её параллельным ветвям) и создающий поле, неподвижное в пространстве и
направленное вдоль оси ![]() .
.
Интересно отметить, что между частотой токов ротора и скоростью ротора существует однозначная связь, которая не нарушается с изменением скорости ротора. В этом отношении машина постоянного тока является синхронной, так как скорость вращения поля и скорость вращения ротора равны.
Для получения уравнений динамической механической характеристики воспользуемся уравнениями обобщенной электрической машины. В соответствии с рис.5-8 получим
![]()
![]()
![]() ,
,
![]()
![]()
![]()
![]()
![]()
![]()
![]()
После подстановки этих величин в (4-3), получим
![]()

Заметим, что ![]() (5-5)
(5-5)
представляет собой
выражение для э.д.с. вращения обмотки ротора, где ![]() поток
возбуждения,
поток
возбуждения,  -
конструктивная постоянная, зависящая от числа пар полюсов "
-
конструктивная постоянная, зависящая от числа пар полюсов "![]() ",
числа пар параллельных ветвей "а" и числа активных проводников
обмотки ротора -
",
числа пар параллельных ветвей "а" и числа активных проводников
обмотки ротора - ![]() ;
;
Уравнение для электромагнитного момента с учетом (5-5) принимает вид
![]()
5.3 Электромеханические свойства коллекторных двигателей постоянного тока независимого возбуждения
Двигатели постоянного тока имеют одно существенное преимущество - их движущие моменты зависят не от положения ротора и скорости вращения, а только от токов в обмотках якоря и возбуждения, т.к. конструкция машины обеспечивает ортогональность потока возбуждения и потока ротора. Если обмотки возбуждения заменить постоянными магнитами, то движущий момент будет практически пропорционален току якоря, а скорость вращения напряжению питания обмотки якоря. Двигатели с постоянными магнитами отличаются большим разнообразием, однако прежде чем рассматривать их основные конструкции и особенности, познакомимся с их общими свойствами.
Независимо от конструкции двигателя уравнения э.д.с. и электромагнитного момента имеют вид
 (5-6)
(5-6)
где ![]() -
напряжение и ток якоря;
-
напряжение и ток якоря; ![]() -
падение напряжения под щетками;
-
падение напряжения под щетками; ![]() -
индуктивность и сопротивление обмотки якоря;
-
индуктивность и сопротивление обмотки якоря;
Уравнение моментов:
![]()
![]() (5-7)
(5-7)
где ![]() -
результирующий момент инерции, равный сумме моментов инерции двигателя и
приведенного момента инерции нагрузки; Мс = Мо + Мн - момент сопротивления,
равный сумме моментов холостого хода Мо и момента нагрузки Мн ; М-
электромагнитный момент двигателя.
-
результирующий момент инерции, равный сумме моментов инерции двигателя и
приведенного момента инерции нагрузки; Мс = Мо + Мн - момент сопротивления,
равный сумме моментов холостого хода Мо и момента нагрузки Мн ; М-
электромагнитный момент двигателя.
Приведенные уравнения позволяют найти выражениедля механической характеристики двигателя:
![]()
 (5-8)
(5-8)
и передаточные функции двигателя по управляющему (напряжение на якоре) и возмущающему (момент сопротивления) воздействиям:
(5-9)
, (5-10)
где ![]() -
скорость идеального холостого хода;
-
скорость идеального холостого хода; ![]() -
коэффициент передачи двигателя;
-
коэффициент передачи двигателя;  -
электромагнитная постоянная якорной цепи;
-
электромагнитная постоянная якорной цепи; ![]() -
электромеханическая постоянная времени;
-
электромеханическая постоянная времени; ![]()
![]() ,
,
![]() - индуктивность и сопротивление
якорной цепи, которые кроме
- индуктивность и сопротивление
якорной цепи, которые кроме ![]() содержат
составляющие, определяемые цепями источника питания, сопротивлением щеточного
контакта и дополнительными элементами, включенными в якорную цепь двигателя, в
том числе соединительными проводами.
содержат
составляющие, определяемые цепями источника питания, сопротивлением щеточного
контакта и дополнительными элементами, включенными в якорную цепь двигателя, в
том числе соединительными проводами.
 Приближенно падение напряжения под
щетками можно учесть эквивалентным сопротивлением
Приближенно падение напряжения под
щетками можно учесть эквивалентным сопротивлением ![]() ,
тогда выражение для механической характеристики двигателя приникает вид
,
тогда выражение для механической характеристики двигателя приникает вид
![]() (5-11)
(5-11)
Из (5-11) следует, что механическая характеристика при
![]() представляет
собой прямую линию. Угловую скорость, соответствующую М=0, равную при
номинальном напряжении на якоре
представляет
собой прямую линию. Угловую скорость, соответствующую М=0, равную при
номинальном напряжении на якоре ![]() ,
называют скоростью идеального холостого хода.
,
называют скоростью идеального холостого хода.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.