· Режим торможенияпротивовключением.
В этом случае машина потребляет как механическую
энергию с вала, так и электрическую из сети. Суммарная энергия расходуется в
силовых цепях машины ![]()
Режим характеризуется большими электрическими потерями.
· Режим динамического торможения. В этом случае преобразованная электрическая энергия тратится на потери в силовой цепи двигателя. Энергию из сети машина не потребляет, поэтому
![]() .
.
Для осуществления данного режима двигатель обычно отключается от сети и в его силовую цепь вводят добавочные сопротивления.
![]()
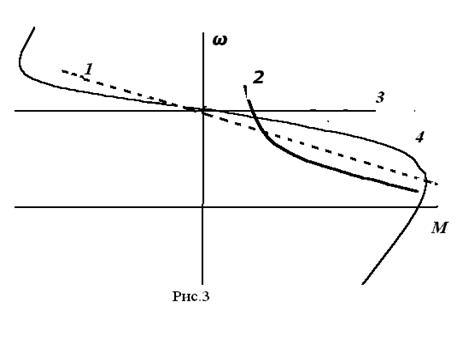 Граничные режимы,
отделяющие двигательные режимы от генераторных, соответствуют определенным
точкам на координатных осях (рис.5-2, 5-3). В точках, где
Граничные режимы,
отделяющие двигательные режимы от генераторных, соответствуют определенным
точкам на координатных осях (рис.5-2, 5-3). В точках, где ![]() при
при
![]() имеет
место так называемый идеальный холостой ход двигателя. Чтобы машина могла работать
в данном режиме, требуется подвести к её валу небольшую мощность для
компенсации механических потерь и дополнительных потерь вне силовой цепи. При
имеет
место так называемый идеальный холостой ход двигателя. Чтобы машина могла работать
в данном режиме, требуется подвести к её валу небольшую мощность для
компенсации механических потерь и дополнительных потерь вне силовой цепи. При ![]() и
и
![]() имеет
место режим короткого замыкания. В этом случае механическая мощность равна
нулю, а потребляемая из сети электрическая энергия полностью расходуется на
потери.
имеет
место режим короткого замыкания. В этом случае механическая мощность равна
нулю, а потребляемая из сети электрическая энергия полностью расходуется на
потери.
 |
Жесткость характеристик механизмов
обозначается буквой ![]() .
.
Механические характеристики различных двигателей и механизмов существенно отличаются по жесткости:
·
для синхронных двигателей ![]()
·
для асинхронных двигателей ![]() ;
;
·
для двигателей постоянного тока с
независимым возбуждением ![]()
·
для двигателей постоянного тока
последовательного и смешанного возбуждения ![]()
·
для центробежного вентилятора
(рис.5-4,в) ![]()
·
для подъёмной лебедки (рис. 5-4,а)
![]()
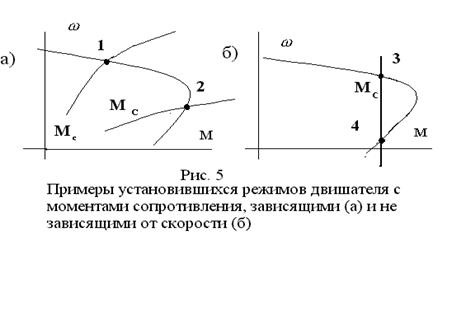
Установившийся режим работы двигателя характеризуется
неизменными моментом и угловой скоростью и его можно рассматривать как
состояние равновесия относительно координаты ![]() .
Такой режим может быть устойчивым или неустойчивым. Критерием устойчивости
механических систем с одной степенью свободы является условие возникновения
динамического момента при выведении системы из состояния равновесия,
возвращающего систему в исходное состояние. Это означает, что знак возникающего
динамического момента должен быть противоположен знаку приращения координаты. В
рассматриваемом случае это означает, что условием устойчивости
установившегося режима является противоположность знаков у приращения скорости
и у возникающего при это динамического момента,
т.е.
.
Такой режим может быть устойчивым или неустойчивым. Критерием устойчивости
механических систем с одной степенью свободы является условие возникновения
динамического момента при выведении системы из состояния равновесия,
возвращающего систему в исходное состояние. Это означает, что знак возникающего
динамического момента должен быть противоположен знаку приращения координаты. В
рассматриваемом случае это означает, что условием устойчивости
установившегося режима является противоположность знаков у приращения скорости
и у возникающего при это динамического момента,
т.е.
![]() .
.
Так как в окрестности точки установившегося режима при
малых отклонениях скорости ![]() механические
характеристики могут быть приняты линейными, то
механические
характеристики могут быть приняты линейными, то
![]() и
и ![]()
![]() .
.
Следовательно, ![]()
![]() .
.
![]() Для выполнения условия устойчивости необходимо чтобы
разность (
Для выполнения условия устойчивости необходимо чтобы
разность (![]() )
была отрицательна, т.е. условие устойчивости может быть записано в следующем
виде
)
была отрицательна, т.е. условие устойчивости может быть записано в следующем
виде ![]()
На основании полученных условий устойчивости точки 1,2 и 3 на рис.5-5 относятся к устойчивой работе, а точка 4 – к неустойчивой.
Для изменения скорости рабочего органа
необходимо регулировать скорость приводного двигателя. Под регулированием
скорости электродвигателей понимают целенаправленное ее изменение независимо от
момента на валу в соответствии с требованиями, предъявляемыми к закону
движения рабочего органа механизма. Регулирование скорости обеспечивается
изменением параметров электрических цепей (сопротивлений) или источников
питания (напряжение, частота). Изменение момента сопротивления приводит к
отклонению скорости от заданного значения. Для оценки регулировочных свойств
привода (составной частью которого является двигатель) используются некоторые
показатели, основным из которых является диапазон регулирования ![]() .
.
Под диапазоном регулирования понимают отношение максимальной скорости холостого хода к минимальной скорости холостого хода при заданной относительной ошибке регулирования, т.е.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.