Двигатели с независимым возбуждением имеют внутреннюю фиксацию ротора при обесточенных обмотках, ток возбуждения не протекает по коммутатору, что позволяет снизить его установленную мощность по сравнению с двигателем с самовозбуждением, но такие двигатели конструктивно более сложны.
Двигатели с постоянными магнитами такие же характеристики, как и двигатели с независимым возбуждением, однако у них нет потерь на возбуждение.
Электромагнитный момент индукторного шагового двигателя
 ,
,
где ![]() -м.д.с.
обмотки независимого возбуждения (или эквивалентная величина для двигателя с
другим типом возбуждения).
-м.д.с.
обмотки независимого возбуждения (или эквивалентная величина для двигателя с
другим типом возбуждения).
В индукторных шаговых двигателях используется
первая гармоника 
 Составляющая
Составляющая
![]() является
характеристиками системы возбуждения, а вращающий момент пропорционален току,
тогда как для реактивных шаговых двигателей он пропорционален квадрату тока.
Составляющая вращающего момента
является
характеристиками системы возбуждения, а вращающий момент пропорционален току,
тогда как для реактивных шаговых двигателей он пропорционален квадрату тока.
Составляющая вращающего момента  также
присутствует, но имеет меньшее значение.
также
присутствует, но имеет меньшее значение.
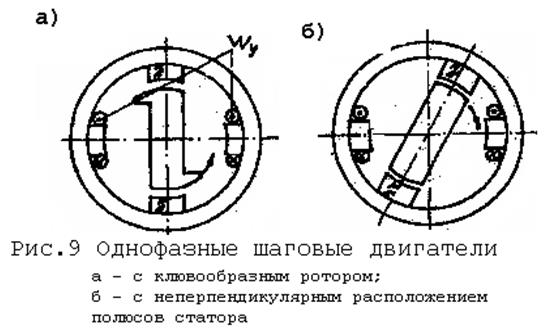
Нереверсивные шаговые двигатели. Шаговые двигатели этого типа , чаще всего однофазные или двухфазные, находят широкое распространение благодаря чрезвычайной простоте системы управления. Их основная особенность – избирательное направление вращения, определяемое конструкцией двигателя.
 На рис.9 представлены схемы однофазных индукторных шаговых двигателей. У
однофазного двигателя с несимметричным ротором (рис.9 а) при обесточенной
обмотке ротор фиксируется полем постоянных магнитов. При подаче на вход
системы управления импульса ротор поворачивается на угол
На рис.9 представлены схемы однофазных индукторных шаговых двигателей. У
однофазного двигателя с несимметричным ротором (рис.9 а) при обесточенной
обмотке ротор фиксируется полем постоянных магнитов. При подаче на вход
системы управления импульса ротор поворачивается на угол ![]() в
сторону клювообразных выступов. При отключении обмотки он поворачивается ещё
на угол
в
сторону клювообразных выступов. При отключении обмотки он поворачивается ещё
на угол ![]() и
фиксируется полем постоянных магнитов. Шаг ротора равен
и
фиксируется полем постоянных магнитов. Шаг ротора равен ![]() .
Обычно двигатели такого типа выполняются многополюсными. Однонаправленное
движение ротора характерно для конструкций с неперпендикулярным расположением
фиксирующих и управляющих полюсов статора (рис.9) При подаче импульса управления
ротор начинает движение в сторону управляющих полюсов и достигает максимальной
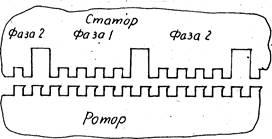
скорости в рис.10. Развертка магнитной системы двухфазного реактивного шагового
двигателя в положении, соосном с осью полюсов. В этот момент система управления
отключает обмотки, ротор продолжает движение по инерции и под действием поля
фиксирующих магнитов приходит в новое устойчивое положение.
.
Обычно двигатели такого типа выполняются многополюсными. Однонаправленное
движение ротора характерно для конструкций с неперпендикулярным расположением
фиксирующих и управляющих полюсов статора (рис.9) При подаче импульса управления
ротор начинает движение в сторону управляющих полюсов и достигает максимальной
скорости в рис.10. Развертка магнитной системы двухфазного реактивного шагового
двигателя в положении, соосном с осью полюсов. В этот момент система управления
отключает обмотки, ротор продолжает движение по инерции и под действием поля
фиксирующих магнитов приходит в новое устойчивое положение.
Рис.10 Шаг
двигателя равен ![]() .
Эти двигатели также выполняются многополюсными.
.
Эти двигатели также выполняются многополюсными.
Если в конструкции двигателя, представленной на рис.9,а, постоянные магниты заменить управляющими полюсами, то получится двухфазный реактивный шаговый двигатель. У такого двигателя движение ротора будет происходить под влиянием магнитного потока фазных обмоток. С целью уменьшения шага ротора и увеличения равномерности вращения целесообразно использовать двигатели с большим числом зубцов на роторе (рис. 10). Полюсы статора и ротора имеют зубцы с одинаковым зубцовым делением, зубцовые выступы (клювы) обеспечивают пусковой момент и однонаправленность вращения.
СПИСОК ЛИТЕРАТУРЫ
1.Конструирование роботов: Пер. с франц./Андре П., Кофман Ж.-М., Лот Ф.,Тайар Ж.-П.-М.: Мир,1986
2.Хрущев В.В. Электрические машины систем автоматики. Энергоатомиздат,1985
3.Юферов Ф.М.Электрические машины автоматических устройств: Учебник для вузов. М.:Высш.шк.,1976
4.Копылов И.П. Электрические машины. М.:Энергоиздат,1986.
5.Брускин Д.Э. и др. Электрические машины: D 2-х ч. Учеб. для электротехн. спец. вузов.-М.Высш.шк.,1976
6.Волков Н. И. Миловзоров В.П.Электромашинные устройства автоматики. - М.:Высш.шк.,1986.
7 Кенио Т. Шаговые двигатели и их микропроцессорные системы управления. Пер. с англ.- М.:Энергоатомиздат,1987.
8. Сафонов Ю.Н. Электроприводы промышленных роботов.- Энергоатомиздат, 1990.
[1] Praxis der Antriebstechnik. B.7, Servo-Antriebe. Grundlagen, Eigenschaften, Projektierung. Ausgabe 04/96, SEW Eurodrive.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.