|
Рис.4. Сравнение двигателей по массогабаритным показателям |
На рис.4 приведены данные по сравнению массогабаритных показателей трех двигателей фирмы SEW EURODRIVE[1]: асинхронного DEV132M2, 7.5 кВт, 2900 об/мин (обозначен цифрой 1 на рисунке); двигателя постоянного тока GFVN160M, 8.3 кВт, 3200 об/мин (2) и синхронного двигателя с постоянными магнитами DFY112ML, 7.5 кВт, 3000 об/мин (3). На левом графике незаштрихованные столбцы относятся к полной массе двигателя, заштрихованные - к массе ротора. Преимущества синхронного двигателя с постоянными магнитами по этим показателям очевидны. Малый момент инерции, а также в два раза больший, чем у двигателя постоянного тока, допустимый динамический момент, обеспечивают высокие динамические свойства привода с вентильным двигателем. Они, в сочетании с большим диапазоном регулирования скорости и большой перегрузочной способностью, могут оказаться решающими аргументами при выборе привода с вентильным двигателем, несмотря на более высокую, чем у привода с асинхронным двигателем, стоимость.
Приведенное выше
математическое описание синхронного двигателя справедливо и для двигателей с
постоянными магнитами на роторе, если иметь в виду, что ![]() ,
где
,
где ![]() -
полезный поток ротора,
-
полезный поток ротора, ![]() -
число витков обмотки статора.
-
число витков обмотки статора.
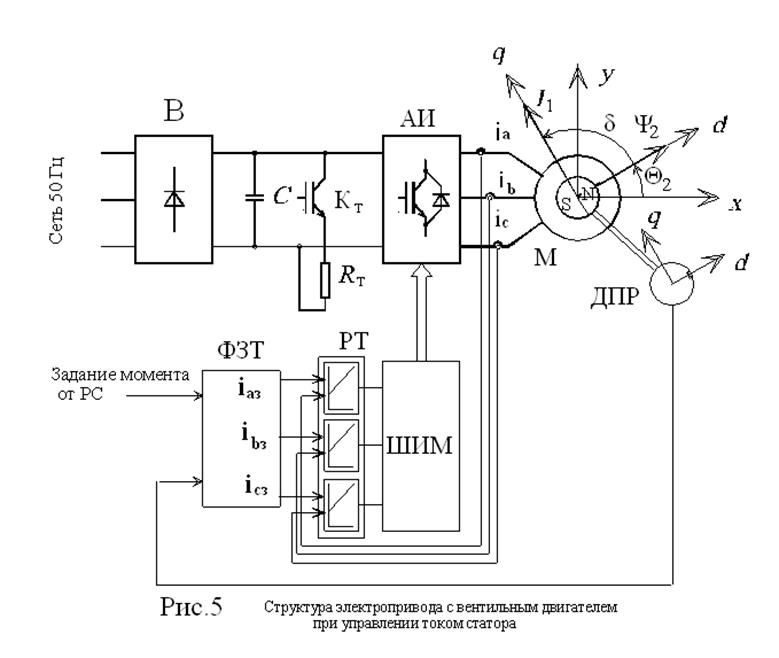 |
Структура
привода показана на рис.5. Путем введения управления инвертором через
регуляторы тока РТ с обратными связями по токам фаз автономному инвертору АИ
придаются свойства инвертора тока. Сигналы ![]() на
выходах формирователя задания токов ФЗТ представляют собой сигналы задания
мгновенных значений токов в фазных обмотках статора. Если, как это часто
бывает, вентильный двигатель из конструктивных соображений выполняется
шестиполюсным, то при номинальной скорости 3000
на
выходах формирователя задания токов ФЗТ представляют собой сигналы задания
мгновенных значений токов в фазных обмотках статора. Если, как это часто
бывает, вентильный двигатель из конструктивных соображений выполняется
шестиполюсным, то при номинальной скорости 3000![]() частота
напряжения на выходе преобразователя должна составлять
частота
напряжения на выходе преобразователя должна составлять ![]() =150
Гц, а соотношение между пространственным углом ротора и углом в электрических
градусах определяется как
=150
Гц, а соотношение между пространственным углом ротора и углом в электрических
градусах определяется как ![]() Однако,
чтобы иметь возможность изобразить на рис.5 обобщенные вектора
Однако,
чтобы иметь возможность изобразить на рис.5 обобщенные вектора ![]() ,
двигатель показан как имеющий число пар полюсов
,
двигатель показан как имеющий число пар полюсов ![]() .
В рассматриваемый момент времени ротор (ось d ) относительно статора (неподвижной системы координат x-y) повернут на угол
.
В рассматриваемый момент времени ротор (ось d ) относительно статора (неподвижной системы координат x-y) повернут на угол ![]() ,
совпадающий при
,
совпадающий при ![]() с
с
![]() .
Этот угол измеряется датчиком положения ротора ДПР, в качестве которого могут
использоваться вращающиеся трансформаторы, редуктосины, резольверы, кодовые
датчики, обеспечивающие измерение угла в пределах одного оборота ротора. В
современных системах в результате обработки сигнала ДПР обычно получают и
сигнал скорости двигателя, используемый для замыкания системы по скорости.
.
Этот угол измеряется датчиком положения ротора ДПР, в качестве которого могут
использоваться вращающиеся трансформаторы, редуктосины, резольверы, кодовые
датчики, обеспечивающие измерение угла в пределах одного оборота ротора. В
современных системах в результате обработки сигнала ДПР обычно получают и
сигнал скорости двигателя, используемый для замыкания системы по скорости.

Алгоритм формирования сигналов задания токов фаз статора поясняет рис.6. На
основании сигнала ДПР рассчитывается угол ![]() в
электрических градусах, к которому прибавляется угол
в
электрических градусах, к которому прибавляется угол ![]() .
По требуемому значению момента двигателя, задаваемому с выхода регулятора
скорости, при известном значении
.
По требуемому значению момента двигателя, задаваемому с выхода регулятора
скорости, при известном значении ![]() рассчитывается
модуль обобщенного вектора тока
рассчитывается
модуль обобщенного вектора тока ![]() .
По углу
.
По углу ![]() с
учетом знака момента в каждый момент времени определяется вектор
с
учетом знака момента в каждый момент времени определяется вектор ![]() ,
по модулю и угловому положению которого рассчитываются требуемые мгновенные
значения токов фаз
,
по модулю и угловому положению которого рассчитываются требуемые мгновенные
значения токов фаз![]() ,
которые в виде сигналов задания
,
которые в виде сигналов задания ![]() вводятся
на входы контуров тока.
вводятся
на входы контуров тока.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.