Формирователь задания токов, регуляторы тока и ШИМ входят в состав микропроцессорной системы управления вентильным двигателем. Показанная на рис.5 система представляет собой систему регулирования момента двигателя. Она должна быть дополнена внешним контуром регулирования скорости с регулятором скорости РС, выходной сигнал которого в соответствии с принципом построения систем подчиненного управления является сигналом задания момента. При необходимости построения системы управления положением контур регулирования скорости дополняется внешним по отношению к нему контуром положения с собственным регулятором.
Шаговые двигатели
Шаговые двигатели представляют собой группу электрических машин, предназначенных для преобразования дискретного сигнала управления в угловое перемещение, называемое шагом. Принцип работы шаговых двигателей основан на дискретном изменении магнитного поля в рабочем зазоре электрической машины, что достигается импульсным возбуждением ее обмоток или их переключением. Скорость вращения и суммарный угол поворота вала определяются соответственно частотой и числом поданных импульсов управления. При отсутствии управляющих импульсов шаговый двигатель находится в режиме фиксированной стоянки и сохраняет результат предыдущих перемещений. В качестве шаговых применяют различные типы электрических машин: синхронные с постоянными магнитами, реактивные синхронные, субсинхронные, асинхронные с неполной клеткой, сельсины, редуктосины и т.п. Обмотки шаговых двигателей получают питание от коммутаторов, преобразующих заданную последовательность управляющих импульсов в m-фазную систему одно- или двуполярных импульсов тока. Для увеличения результирующей м.д.с., а следовательно, и синхронизирующего момента питание подается на две, три и большее число фаз одновременно, при этом ротор занимает положение, совпадающее с направлением результирующей м.д.с. Если поочередно включается то четное, то нечетное число фаз, ротор будет иметь удвоенное число устойчивых состояний. Управление двигателем, при котором фазы обмоток статора включают поочередно равными группами называют симметричным, поочередное включение неравных групп - несимметричным.
Шаговые двигатели принято делить на три основных типа:
- синхронные реактивные с переменным магнитным сопротивлением;
- двигатели с активным ротором, представляющим собой постоянный магнит (магнитоэлектрические);
- двигатели с подмагничиванием (индукторные).
Реактивные шаговые двигатели - наиболее распространенный тип, он включает в себя магнитные цепи с переменным магнитным сопротивлением, зависящим от угла поворота вала. Возникновение движущего момента объясняется искривлением линий магнитного поля и появлением в связи с этим сил магнитного тяжения (эффект Максвелла). Ротор и статор реактивных шаговых двигателей изготавливаются из магнитомягкой стали и имеют зубчатую конструкцию с одинаковым или разным числом зубцов.
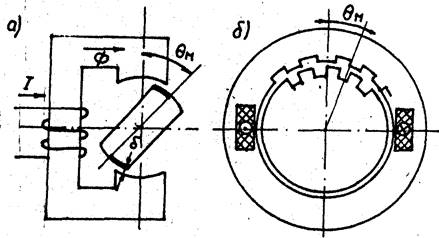
Рис. 1. Однофазные шаговые двигатели с двумя зубцами (а) и числом зубцов много больше двух (б)
На рис. 1 показаны двигатели с двумя и много большим двух числом зубцов. В таких двигателях поток Ф связан с м.д.с. уравнением
![]() ,
(1)
,
(1)
где ![]() - число витков
обмотки статора;
- число витков
обмотки статора; ![]() - ток обмотки статора.
- ток обмотки статора.
Магнитное сопротивление ![]() определяется
положением ротора, при этом угол
определяется
положением ротора, при этом угол ![]() отсчитывается
от оси симметрии статора. Поскольку линии магнитного поля в основном
концентрированы в зоне наименьшего воздушного зазора, то сопротивление в нем
отсчитывается
от оси симметрии статора. Поскольку линии магнитного поля в основном
концентрированы в зоне наименьшего воздушного зазора, то сопротивление в нем
![]() , где
, где ![]() -
величина воздушного зазора;
-
величина воздушного зазора; ![]() -
магнитная проницаемость воздуха; S(
-
магнитная проницаемость воздуха; S(![]() )- площадь
поверхности ротора, обращенная к статору.
)- площадь
поверхности ротора, обращенная к статору.
Уравнение (1) можно записать в виде
![]() или
или
![]() ,
,
где ![]() -
магнитная проводимость.
-
магнитная проводимость.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.