Для случая, показанного на рис.1,
поток имеет максимум при ![]() или
или
![]() ,
а минимум при
,
а минимум при  .
.
Электромагнитный момент определяется магнитной энергией
 (2)
(2)
При постоянстве тока момент определяется по формуле
![]() .
(3)
.
(3)
![]() Если сделать допущение, что магнитная проводимость не зависит от тока
(магнитная цепь не насыщена), то энергию и момент можно представить в виде
Если сделать допущение, что магнитная проводимость не зависит от тока
(магнитная цепь не насыщена), то энергию и момент можно представить в виде
 и
и
 .
(4)
.
(4)
При наличии двухполюсных выступов
период изменения магнитного потока и шаг ротора равны ![]() .
Если увеличить число зубцов ротора
.
Если увеличить число зубцов ротора ![]() ,
то период станет равным
,
то период станет равным ![]()
![]() .
Для увеличения основной составляющей магнитного потока статор также делается
зубчатым (рис. 1). Тогда
.
Для увеличения основной составляющей магнитного потока статор также делается
зубчатым (рис. 1). Тогда
 (5)
(5)
Электрический угол ![]() вводится
как
вводится
как ![]() .
В (5) основная составляющая является первой гармоникой. Момент
.
В (5) основная составляющая является первой гармоникой. Момент ![]() может
изменяться и не по синусоидальному закону, при этом составляющая с
может
изменяться и не по синусоидальному закону, при этом составляющая с ![]() увеличивает
наклон механической характеристики при малых значениях
увеличивает
наклон механической характеристики при малых значениях ![]() .
Поэтому предпочтительнее располагать зубцы ротора с тем же шагом, что и на
статоре, так как все зубцы одного полюсного выступа в этом случае одновременно
участвуют в создании вращающего момента.
.
Поэтому предпочтительнее располагать зубцы ротора с тем же шагом, что и на
статоре, так как все зубцы одного полюсного выступа в этом случае одновременно
участвуют в создании вращающего момента.
 статор
статор
 а) статор
б)
а) статор
б)
ротор
ротор
Рис.2 Возможные геометрические формы ротора и статора
Расположение зубцов ротора несимметрично относительно полюсных выступов (рис. 2,б) позволяет уменьшить влияние высших гармоник магнитной проводимости.
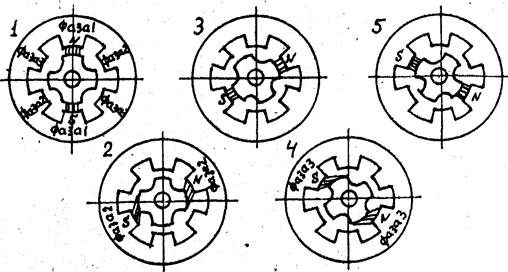 |
Рис.3. Процесс выполнения шагов трехфазным реактивным шаговым двигателем
В многофазных шаговых двигателях
полюсные выступы равномерно распределены по поверхности статора с угловым
смещением ![]() ,
причем число зубцов на роторе может быть меньше числа полюсных выступов,
равно ему или существенно больше. На рис.3 показан процесс отработки шагов
трехфазным шаговым двигателем.
,
причем число зубцов на роторе может быть меньше числа полюсных выступов,
равно ему или существенно больше. На рис.3 показан процесс отработки шагов
трехфазным шаговым двигателем.
Для увеличения числа устойчивых состояний (для уменьшения шага) число зубцов должно быть увеличено. Как было показано ранее, число зубцов статора тоже должно возрасти. Это приводит к использованию конструкций (рис.4), в которых на полюсных выступах статора образованы гребенчатые зоны для увеличения основной составляющей магнитной проводимости и, как следствие, для увеличения момента.
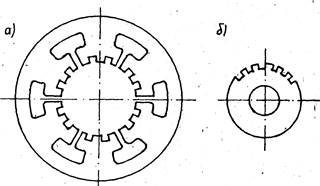
Рис.4. Поперечное сечение трех фазного реактивного шагового двигателя: а -статор; б - ротор
Особую группу реактивных шаговых
двигателей представляют многосекционные или многопакетные шаговые двигатели. Их
особенность состоит в том, что каждая секция двигателя соответствует одной
фазе, а ротор и статор имеют одинаковое число зубцов. Роторы отдельных секций
двигателя смещены на ![]() угол
угол
![]() или
на электрический угол
или
на электрический угол ![]() ,
если все статоры симметричны. Здесь N - число секций двигателя.
,
если все статоры симметричны. Здесь N - число секций двигателя.
На рис.5 показано расположение секций трехсекционного двигателя. Каждая секция электрически и магнитно независима от других. Двигатели этого типа имеют значительный момент инерции и высокую стоимость, так как трудно расположить роторы с малыми угловыми смещениями.
 |
Рис.5 Трехсекционный
шаговый двигатель ![]() )
)
Число фаз m , зубцов ротора ![]() и
количество шагов на один оборот «
и
количество шагов на один оборот «![]() »
связаны для симметричного управления соотношением
»
связаны для симметричного управления соотношением
![]() (6)
(6)
При несимметричном управлении ![]() .
.
Для двигателей с разным количеством зубцов на статоре и роторе (рис. 2.б , 3) имеем соотношение
![]() (7)
(7)
где ![]() -
число зубцов статора на фазу.
-
число зубцов статора на фазу.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.