При отсутствии в
кривой потока высших гармоник, в установившемся режиме достигается ![]() При этом
При этом
![]() ,
, ![]() , а
, а ![]() Таким
образом, составляющая
Таким
образом, составляющая ![]() непосредственно
связана с величиной и знаком ошибки
непосредственно
связана с величиной и знаком ошибки ![]() С помощью
задающего сигнала
С помощью
задающего сигнала ![]() устанавливается
минимальное значение ошибки, обусловленное высшими гармониками потока.
устанавливается
минимальное значение ошибки, обусловленное высшими гармониками потока.
Полученные на
выходе блока БВФ функции ![]() и
и
![]() используются
для координатного преобразования токов
используются
для координатного преобразования токов ![]() и
и ![]() , которое
осуществляется блоком БКП2. Этот блок не имеет отличий от БКП1, на его выходе
получаются составляющие токов
, которое
осуществляется блоком БКП2. Этот блок не имеет отличий от БКП1, на его выходе
получаются составляющие токов ![]() и
и
![]() ,
постоянные по значению для установившегося режима.
,
постоянные по значению для установившегося режима.
Эти значения
составляющих тока, а также ![]() и
величина скорости
и
величина скорости ![]() поступают
в блок регуляторов переменных БРП, где используются в качестве сигналов
обратных связей. В данной схеме в контур скорости введен блок
деления, определяющий заданное значение активного тока
поступают
в блок регуляторов переменных БРП, где используются в качестве сигналов
обратных связей. В данной схеме в контур скорости введен блок
деления, определяющий заданное значение активного тока ![]() по
заданному значению момента
по
заданному значению момента ![]() и
текущему значению потокосцепления
и
текущему значению потокосцепления ![]() .
.
Потокосцепление
статора можно выразить через токи обмоток статора и потокосцепление ротора![]()
 (3.8)
(3.8)
Если учесть, что при
ориентации по полю ![]() ,
а
,
а ![]() , то
подставляя (3.8) в исходные уравнения, можно получить
, то
подставляя (3.8) в исходные уравнения, можно получить
 |
Решив (3.9) относительно токов, можно найти их связь с составляющими вектора напряжения:
 (3.10)
(3.10)
Полученный
результат указывает на то, что полученные на выходе регуляторов РТ1и РТ2
управляющие воздействия ![]() и
и
![]() оказывают
влияние не только на свою переменную, но и на переменную другого канала. Исключить
взаимное влияние можно путем формирования управляющих воздействий
оказывают
влияние не только на свою переменную, но и на переменную другого канала. Исключить
взаимное влияние можно путем формирования управляющих воздействий ![]() и
и ![]() из двух
составляющих:
из двух
составляющих:
 (3.11)
(3.11)
Подставив (3.11) в
(3.10) можно убедиться в том, что при ![]() изменения
изменения
![]() не окажут
влияния на намагничивающий ток и наоборот.
не окажут
влияния на намагничивающий ток и наоборот.
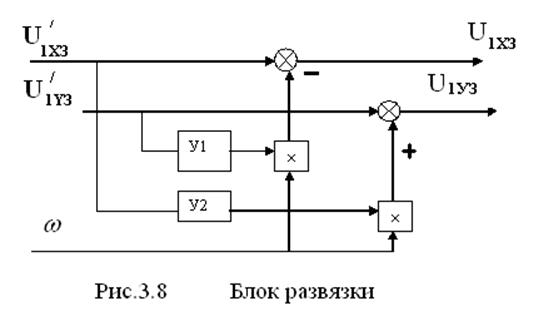 |
Вычисленные
блоком развязки ![]() и
и
![]() ,
ориентированные по полю, с помощью формул обратного преобразования блоком
БКП3 преобразуются в
,
ориентированные по полю, с помощью формул обратного преобразования блоком
БКП3 преобразуются в ![]() и
и
![]() , ориентированные
относительно статора. Блок БФП3 осуществляет двухфазно-трехфазное
преобразование и на его выходе формируются трехфазные задающие напряжения
, ориентированные
относительно статора. Блок БФП3 осуществляет двухфазно-трехфазное
преобразование и на его выходе формируются трехфазные задающие напряжения ![]() для
управления преобразователем частоты.
для
управления преобразователем частоты.
Динамические свойства рассмотренной системы могут быть оценены по упрощенной структурной схеме, которая показана на рис. 3.9
Рис.3.9
Преобразователь частоты в этой схеме совместно с блоками измерения и преобразования координат упрощенно учтен введением эквивалентного звена с передаточной функцией
где ![]() -
эквивалентный коэффициент передачи преобразователя частоты,
-
эквивалентный коэффициент передачи преобразователя частоты, ![]() - эквивалентная
постоянная времени преобразователя частоты.
- эквивалентная
постоянная времени преобразователя частоты.
Обозначив 
где ![]() -
коэффициент рассеяния потоков статора и ротора, получим
-
коэффициент рассеяния потоков статора и ротора, получим
Контуры
регулирования токов ![]() и
и
![]() в
полученной структурной схеме одинаковы. Малой некомпенсированной постоянной
времени является
в
полученной структурной схеме одинаковы. Малой некомпенсированной постоянной
времени является ![]() ,
регуляторы токов ТР1 и ТР2 целесообразно выбирать пропорционально-интегральными.
Синтез регулятора скорости ведется традиционными для систем подчиненного
регулирования методами. Последовательно с регулятором скорости установлен блок
деления БД, компенсирующий влияние узла умножения, необходимого для формирования
электромагнитного момента двигателя.
,
регуляторы токов ТР1 и ТР2 целесообразно выбирать пропорционально-интегральными.
Синтез регулятора скорости ведется традиционными для систем подчиненного
регулирования методами. Последовательно с регулятором скорости установлен блок
деления БД, компенсирующий влияние узла умножения, необходимого для формирования
электромагнитного момента двигателя.
Векторная частотно-токовая система регулирования.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.