 |
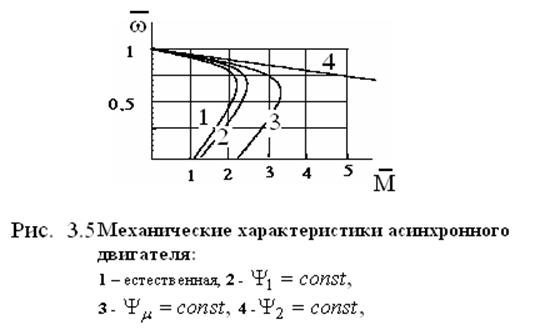
Данный тип систем векторного управления не является широко распространенным. Стабилизация потока статора используется главным образом в электроприводах со скалярным управлением (IR-компенсация), в тех случаях, когда к ним не предъявляется высоких требований по быстродействию.
Системы со
стабилизацией потока в воздушном зазоре обеспечивают кратность момента ![]() но в переходных
процессах требуется форсировка по напряжению статора. Из-за наличия потоков
рассеяния рост момента сопровождается увеличением потока статора и возможностью
насыщения магнитной системы. Для предотвращения этого явления при больших
нагрузках необходимо снижать поток в воздушном зазоре.
но в переходных
процессах требуется форсировка по напряжению статора. Из-за наличия потоков
рассеяния рост момента сопровождается увеличением потока статора и возможностью
насыщения магнитной системы. Для предотвращения этого явления при больших
нагрузках необходимо снижать поток в воздушном зазоре.
Системы со
стабилизацией потока ротора теоретически обеспечивают неограниченную кратность
момента и линейные механические характеристики. Однако при больших моментах
из-за наличия потоков рассеяния происходит насыщение статора. Для исключения
этого приходится уменьшать поток ротора, что приводит к падению жесткости
механических характеристик. Практически достигаемая кратность момента
составляет ![]() . В
переходных процессах требуются значительные форсировки по напряжению статора
асинхронного двигателя и он испытывает большие термические перегрузки.
. В
переходных процессах требуются значительные форсировки по напряжению статора
асинхронного двигателя и он испытывает большие термические перегрузки.
Векторные системы управления формируют мгновенные значения управляющих воздействий (ток, напряжение) и поддерживают ортогональность векторов, определяющих момент двигателя (2.10, 2.12) .
Для поддержания потокосцепления постоянным как в установившихся, так и в переходных режимах, необходимо регулировать не только величину, но и фазу (или отдельно каждую проекцию) результирующего вектора. Отсюда происходит второе название таких систем - системы с ориентацией по полю.
Информацию о потоке (потокосцеплении) можно получить либо путем прямого измерения потока ( датчики потока, специальные измерительные обмотки двигателя), либо путем его вычисления по моделям двигателя. В последнем случае системы управления называют системами косвенного векторного управления (indirect vector control).
Векторные системы управления оперируют не с реальными переменными, а с их преобразованными значениями. Для этой цели используются координатные преобразования, которые являются не только эффективным средством упрощения анализа характеристик электропривода, но и открывают определенные возможности синтеза управляющих устройств для автоматического управления приводами переменного тока.
Для выявления этих
возможностей положим, что система частотного управления обеспечивает
поддержание постоянства потокосцепления ротора ![]() , и,
воспользовавшись уравнениями (2.18), (2.23) , запишем для статического режима
уравнения механической характеристики в осях X-Y, вращающихся со скоростью поля
статора:
, и,
воспользовавшись уравнениями (2.18), (2.23) , запишем для статического режима
уравнения механической характеристики в осях X-Y, вращающихся со скоростью поля
статора:
 (3.5)
(3.5)
Совместим ось Х с вектором ![]() , тогда
, тогда
![]()
![]()
![]() .
Система (3.5) принимает вид:
.
Система (3.5) принимает вид:
 (3.6)
(3.6)
Полученный
результат свидетельствует о том, что так как ![]() , ток
, ток ![]() является
намагничивающим током машины, а электромагнитный момент при
является
намагничивающим током машины, а электромагнитный момент при ![]() будет
пропорционален току
будет
пропорционален току ![]()
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.