 .
(3.7)
.
(3.7)
Отсюда следует, что если при управлении асинхронным двигателем оперировать не с реальными переменными, а с их преобразованными значениями, можно раздельно управлять величинами магнитного потока и момента двигателя, имея дело не с синусоидальными переменными величинами, а с их преобразованными постоянными значениями. Это позволяет строить систему управления аналогично принципам, используемым для двигателей постоянного тока.
Основой для таких
систем является информация о мгновенном значении и пространственном положении
вектора потокосцепления ![]() в
воздушном зазоре, измерение которого обычно осуществляется с помощью датчиков
Холла.
в
воздушном зазоре, измерение которого обычно осуществляется с помощью датчиков
Холла.
Рассмотрим один из вариантов такой системы, разработанный фирмой Siemens и получивший название Transvektor, рис.3-6.
В
соответствии с изложенным, для реализации управления потоком и моментом двигателя
необходимо измерить мгновенные трехфазные токи статора, поток в зазоре,
осуществить преобразование трехфазных переменных к эквивалентным двухфазным,
произвести координатное преобразование к осям, ориентированным по полю.
Определенные таким образом ![]() и
и
![]() надо сравнить
с их заданными значениями, получить сигналы управления потоком и моментом в
осях X и Y, а затем осуществить обратные преобразования: координатное и
двухфазно-трехфазное для управления преобразователем частоты.
надо сравнить
с их заданными значениями, получить сигналы управления потоком и моментом в
осях X и Y, а затем осуществить обратные преобразования: координатное и
двухфазно-трехфазное для управления преобразователем частоты.
Система состоит из трех крупных блоков: блока вычисления текущих значений переменных БВТП, блока регуляторов переменных БРП, блока вычисления заданных значений переменных БВЗП.
Блок БВТП
преобразует измеренные с помощью датчиков Холла трехфазные значения потока в
воздушном зазоре![]() и
и
![]() и
измеренные с помощью датчиков тока действительные трехфазные переменные токи
и
измеренные с помощью датчиков тока действительные трехфазные переменные токи ![]() и
и ![]() в
ориентированные по полю значения потокосцепления
в
ориентированные по полю значения потокосцепления ![]() ,
намагничивающего тока
,
намагничивающего тока ![]() и
активного тока
и
активного тока ![]() .
.
Он состоит из блоков фазных преобразований БФП1 и БФП2, блока векторного фильтра БВФ и блока координатного преобразования БКП2. Блок БФП1 осуществляет трехфазно-двухфазное преобразование потокосцепления в воздушном зазоре в потокосцепление ротора, т.к. датчики измерят потокосцепление в зазоре, в соответствии с формулами:
Необходимые
значения токов ![]() и
и
![]() вычисляются
блоком БВП2. Блок векторного фильтра БВФ решает задачу определения
мгновенного пространственного угла поворота
вычисляются
блоком БВП2. Блок векторного фильтра БВФ решает задачу определения
мгновенного пространственного угла поворота ![]() вектора
потокосцепления
вектора
потокосцепления ![]() .
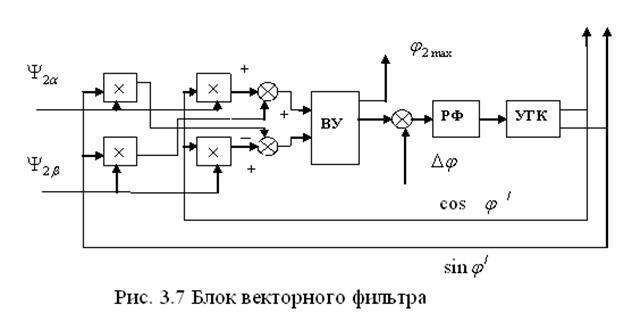
Решение этой задачи осложняется наличием зубцовых пульсаций потока машины,
уменьшение влияния которых обеспечивается векторным фильтром. Схема векторного
фильтра приведена на рис . 3-7.
.
Решение этой задачи осложняется наличием зубцовых пульсаций потока машины,
уменьшение влияния которых обеспечивается векторным фильтром. Схема векторного
фильтра приведена на рис . 3-7.
|
Составной частью
БВФ является блок координатных преобразований БКП1, на входы которого
подаются ![]() и
и ![]() , а также
, а также
![]() и
и ![]()
![]() , вырабатываемые
управляемым генератором колебаний УГК.
, вырабатываемые
управляемым генератором колебаний УГК.
В общем случае ![]() , поэтому
блок БКП1 осуществляет координатные преобразования в соответствии с
зависимостью
, поэтому
блок БКП1 осуществляет координатные преобразования в соответствии с
зависимостью
Так как ![]() и
и ![]() , то
подставив эти значения в предыдущие формулы получим
, то
подставив эти значения в предыдущие формулы получим
На выходе БКП1
получаются составляющие вектора ![]() в
виде периодических функций разности углов
в
виде периодических функций разности углов ![]() и
и ![]() .
Вычислительное устройство ВУ определяет модуль
.
Вычислительное устройство ВУ определяет модуль ![]() и угол
и угол ![]() Сигнал
обратной связи подается на вход ПИ регулятора фазы, выходная величина
которого воздействует на УГК , уменьшая
Сигнал
обратной связи подается на вход ПИ регулятора фазы, выходная величина
которого воздействует на УГК , уменьшая ![]() .
.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.