Динамика
любой симметричной многофазной машины, имеющей m фаз
статора и n фаз ротора, может быть путем замены переменных
описана системой уравнений эквивалентной двухфазной машины. Использование
двухфазной модели двигателя позволяет избежать значительных вычислительных
трудностей, связанных с увеличением числа уравнений и параметров машины, и за
счет этого облегчить понимание природы преобразования энергии во вращающейся
машине. При переходе от реальной трехфазной машины к ее двухфазной модели
возникает задача преобразования реальных переменных Х1А, Х1В,
Х1С к ортогональной системе координат ![]() и
и ![]() , т.е. к
реальным переменным двухфазной машины. Данная задача должна решаться отысканием
формул преобразования переменных при условии инвариантности мощности. Представим
реальные переменные в виде векторов и будем полагать, что преобразованные
переменные в осях
, т.е. к
реальным переменным двухфазной машины. Данная задача должна решаться отысканием
формул преобразования переменных при условии инвариантности мощности. Представим
реальные переменные в виде векторов и будем полагать, что преобразованные
переменные в осях ![]() и
и ![]() пропорциональны
сумме проекций переменных Х1А, Х1В, Х1С на
оси
пропорциональны
сумме проекций переменных Х1А, Х1В, Х1С на
оси ![]() и
и ![]() .
.
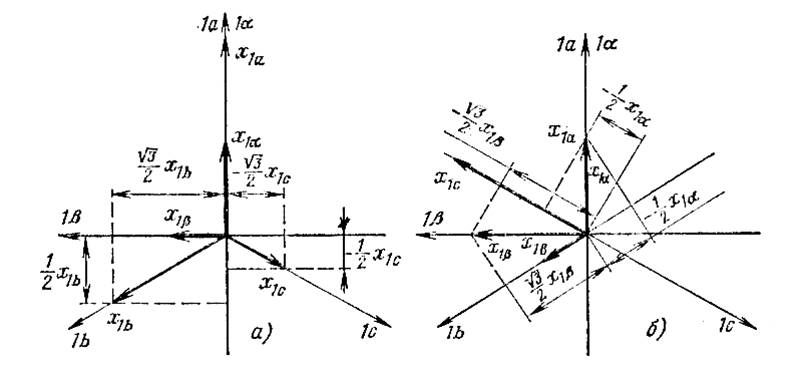
Рис.2-2
Из рис. 2-2 можно определить:
![]()
![]() где КС –
согласующий коэффициент, выбор которого осуществляется из условия инвариантности
мощности.
где КС –
согласующий коэффициент, выбор которого осуществляется из условия инвариантности
мощности.
Для симметричной трехфазной машины выполняется условие
Х1А +Х1В+ Х1С= 0, (2-14)
поэтому (2.13) с учетом (2.14) преобразуется к виду
![]() ,
,
![]() .
(2-15)
.
(2-15)
Переменные Х2d и Х2q для роторной цепи также определяются по выражениям (2.13) и (2.15) при соответствующей замене индексов.
Формулы обратного двухфазно-трехфазного преобразования можно получить с помощью рис. 2-2, б:
![]() ,
,

(2.16)
При выполнении
(2-14) третье уравнение системы (2-16) может быть получено из первых двух, т.к.
![]() .
.
Для определения согласующего коэффициента КС, обеспечивающего выполнение условия инвариантности при преобразовании переменных, рассмотрим выражение для мгновенной мощности, потребляемой обмотками статора трехфазной машины из сети:

![]()
Из условия баланса мощностей
исходного трехфазного двигателя и его двухфазной модели необходимо, чтобы
согласующий коэффициент имел значение ![]() . При этом
. При этом
![]() .
.
С четом согласующего коэффициента формулы трехфазно - двухфазного преобразования (2-13) приобретают вид
 ;
;
 ,
,
Формулы (2.15) представляют собой трехфазно-двухфазное преобразование, позволяющее реальный трехфазный асинхронный двигатель заменить эквивалентной системой двух ортогональных обмоток. Подставляя мгновенные значения переменных в (2.15) получим

Результирующий
пространственный вектор ![]() представляет
собой векторную сумму потокосцеплений
представляет
собой векторную сумму потокосцеплений ![]() и
и ![]() , т.е.
, т.е. ![]()
Модуль
результирующего вектора ![]() ,
а аргумент -
,
а аргумент - ![]()
В двухполюсной обобщенной машине число пар полюсов
равно единице ![]() , поэтому
угловая скорость результирующего вектора
, поэтому
угловая скорость результирующего вектора ![]() численно
равна угловой частоте переменного
тока.
численно
равна угловой частоте переменного
тока.
В реальной многополюсной машине поле вращается
медленнее в ![]() раз, что
необходимо учитывать при расчете характеристик реальных асинхронных двигателей.
раз, что
необходимо учитывать при расчете характеристик реальных асинхронных двигателей.
Сравнивая
потокосцепления ![]()
![]() и
и ![]() c
аналогичными выражениями для двухфазной обобщенной модели можно заметить, что
трехфазная система также образует вращающееся магнитное поле, но результирующий
вектор потокосцепления в 1,5 раза превышает потокосцепление отдельных фаз. Это
означает, что для соблюдения эквивалентности преобразования необходимо
учитывать согласующий коэффициент КС. Обратное двухфазно-трехфазное
преобразование осуществляется с помощью изображающего вектора по (2.16).
c
аналогичными выражениями для двухфазной обобщенной модели можно заметить, что
трехфазная система также образует вращающееся магнитное поле, но результирующий
вектор потокосцепления в 1,5 раза превышает потокосцепление отдельных фаз. Это
означает, что для соблюдения эквивалентности преобразования необходимо
учитывать согласующий коэффициент КС. Обратное двухфазно-трехфазное
преобразование осуществляется с помощью изображающего вектора по (2.16).
В трехфазной системе изображающий вектор совпадает по
направлению с результирующим, но отличается от него по величине ![]()
 . Множитель
3/2 будет встречаться в тех формулах, где из уравнений, записанных для
изображающего вектора, необходимо сделать выводы о переменных, зависящих от
переменных трехфазного двигателя.
. Множитель
3/2 будет встречаться в тех формулах, где из уравнений, записанных для
изображающего вектора, необходимо сделать выводы о переменных, зависящих от
переменных трехфазного двигателя.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.