Лекция13
1. Частотное управление асинхронными двигателями
Электромеханическое
преобразование энергии в асинхронных машинах происходит при наличии взаимно
неподвижных вращающихся полей статора и ротора, т.е. при выполнении условия ![]() , где
, где ![]() частота
вращения поля статора,
частота
вращения поля статора, ![]() частота
вращения поля ротора относительно ротора,
частота
вращения поля ротора относительно ротора, ![]() частота
вращения ротора,
частота
вращения ротора, ![]() число
пар полюсов,
число
пар полюсов, ![]() и
и ![]() - частоты
токов статора и ротора соответственно.
- частоты
токов статора и ротора соответственно.
Мощность,
потребляемая машиной из сети, равна ![]()
![]() мощность, отдаваемая
нагрузке, полезная мощность,
мощность, отдаваемая
нагрузке, полезная мощность, ![]() ,
а их разность - это мощность потерь, связанная с преобразованием энергии.
,
а их разность - это мощность потерь, связанная с преобразованием энергии.
![]()
![]()
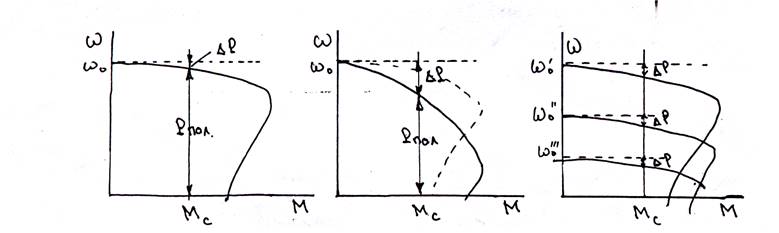
Рис. 1-1
Параметрические
способы регулирования скорости (изменение амплитуды питающего напряжения или
изменение сопротивления цепи ротора у двигателей с фазным ротором) приводят к
тому, что скорость идеального холостого хода двигателя остается неизменной, а
это означает, что при постоянном моменте нагрузки электромагнитная мощность
потребляемая двигателем из сети также остается постоянной. Работа двигателя
на пониженной скорости сопровождается ростом потерь, которые оказываются
пропорциональными частоте скольжения ![]() где
где
![]() .
.
Применение
частотных способов регулирования, при которых изменяется скорость холостого
хода, т.е. ![]() ,
сопровождается уменьшением величины потребляемой энергии при практически
неизменной величине потерь.
,
сопровождается уменьшением величины потребляемой энергии при практически
неизменной величине потерь.
Благоприятные энергетические соотношения при частотном регулировании и наличие в настоящее время регулируемых по частоте и напряжению источников питания привели к тому, что этот способ регулирования скорости и момента асинхронных двигателей стал основным.
1.1. Законы частотного регулирования
При выборе закона частотного регулирования часто исходят из условия сохранения перегрузочной способности двигателя:
![]()
Пренебрегая
паданием напряжения на активном сопротивлении цепи статора, ![]() и учитывая,
что
и учитывая,
что ![]()
![]() , можно найти
, можно найти

Для любой частоты ![]() и
соответствующей угловой скорости
и
соответствующей угловой скорости ![]() можно
записать
можно
записать

где ![]() фазное
напряжение при частоте
фазное
напряжение при частоте![]() ,
, ![]() - момент
статической нагрузки на валу двигателя при скорости
- момент
статической нагрузки на валу двигателя при скорости ![]()
Из последнего
выражения следует, что для двух любых значений частот ![]() и
и ![]() должно
соблюдаться равенство
должно
соблюдаться равенство
Отсюда следует закон частотного регулирования
 или в
относительных единицах
или в
относительных единицах
![]()
Этот закон называют основным законом частотного регулирования или законом Костенко, который описал его в статье “Работа многофазного асинхронного двигателя при переменном числе периодов” - Электричество, N2, 1925 г.
Закон получен в пренебрежении падением напряжения на активных сопротивлениях статора и насыщением магнитной цепи. Закон Костенко дает выражение для напряжения при произвольном значении частоты и учитывает свойства нагрузки. Если нагрузка с уменьшением частоты также уменьшается, то нет смысла сохранять поток двигателя неизменным. Его можно уменьшить настолько, чтобы сохранить коэффициент статической перегрузки, т.е. запас статической устойчивости.
Уменьшение потока с уменьшением нагрузки при том же запасе устойчивости дает уменьшение потерь в стали и повышает экономичность привода с частотным управлением и часто изменяющейся нагрузкой по сравнению с асинхронным двигателем при постоянной частоте питания.
Диапазон
регулирования скорости двигателя ограничен сверху насыщением магнитопровода.
С ростом отношения ![]() растет
поток и резко увеличивается ток намагничивания
растет
поток и резко увеличивается ток намагничивания ![]() . По этой
причине применение закона Костенко практически ограничено нагрузками, не
слишком превышающими
. По этой
причине применение закона Костенко практически ограничено нагрузками, не
слишком превышающими ![]() .
.
Нижняя граница диапазона зависит от статического момента при трогании двигателя.
Практическое применение основного закона ( закона Костенко) ограничивают трудности непосредственного измерения момента на валу двигателя.
Задача упрощается в ряде практических случаев, если учесть реальный характер изменения статического момента. Для многих механизмов зависимость момента от скорости в зоне регулирования м.б. представлена в виде степенной функции вида
 , где М0 - момент
статической нагрузки при
, где М0 - момент
статической нагрузки при ![]()
![]()
Учитывая, что ![]() получим
получим ![]()
Основной закон принимает вид ![]()
![]()
Из всего многообразия
зависимостей ![]() наиболее
часто встречаются три случая:
наиболее
часто встречаются три случая:
1. - ![]() не зависит от
скорости
не зависит от
скорости ![]() q=0, Мс=
const, U1/f1=const или
q=0, Мс=
const, U1/f1=const или ![]() .
.
2. - Регулирование с постоянной мощностью
Рс= const. ![]()
![]()
![]()
![]() ,
, ![]()
![]()
3. Идеализированная вентиляторная нагрузка:
![]()
![]()
![]() ,
, ![]()
Характеристики двигателя для трех указанных случаев показаны на рисунках 1.2а, 1.2б, 1.2 с.
а б с
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() М
М
![]()
![]()
Рис.1-2
 Применение упрощенных законов частотного регулирования
позволяет получить наиболее простые системы регулирования (рис.1.3), в которых
входным воздействием является частота f1, а закон регулирования
задается блоком связи БС.
Применение упрощенных законов частотного регулирования
позволяет получить наиболее простые системы регулирования (рис.1.3), в которых
входным воздействием является частота f1, а закон регулирования
задается блоком связи БС.
|
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.




