Специальные электродвигатели и электромеханизмы
Во многих исполнительных механизмах значительная доля приводов используется для обеспечения поступательного или возвратно-поступательного движения. Применение для этих целей двигателей с вращательным движением ротора требует использования различных, иногда весьма сложных, механических преобразователей.Ими могут быть шатунно- кривошипный механизм, передачи типа винт-гайка и рейка-шестерня, гибкие передачи с системой блоков и тросов и т.п.
При вращательном движении рабочего органа в подавляющем большинстве случаев требуется изменять скорость вращения исполнительного двигателяили ограничивать угол поворота его выходного вала для согласования углов поворота и скоростей вращения двигателя и механизма.
Указанные причины привели к созданию различных электродвигателей и электромеханизмов, позволяющих непосредственно получать линейное движение или движение на плоскости по двум координатам, а также вращательное движение с необходимой скоростью.
Применение специальных двигателей дает возможность исключить передаточный механизм в виде преобразователя движения, решить задачу согласования характеристик источника механической энергии электродвигателя и исполнительного механизма.
Основное преимущество двигателей такого типа заключается в устранении механических контактов между первичной и вторичной частями двигателя, следствием чего является снижение механических потерь, отсутствие износа кинематических пар, упрощение кинематической схемы, повышение точности и надежности управления.
Далее приведены лишь некоторые примеры, призванные возбудить интерес читателей к этой группе электромеханических преобразователей энергии и показать, что процесс проектирования исполнительных систем различного технологического оборудования — многовариантный, требующий тщательного анализа.
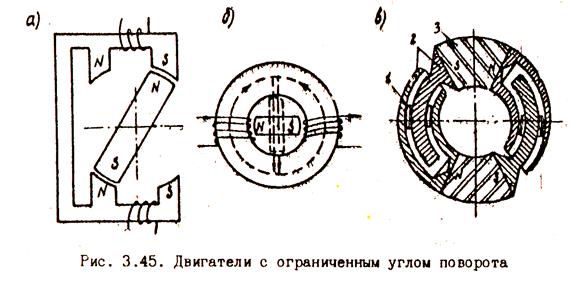
Двигатели с ограниченным перемещением.
Шаговый двигатель с двумя устойчивыми положениями даже при отсутствии тока управления в обмотке ( рис. 3.45-а с помощью импульса тока )может перейти из одного устойчивого положения в другое. Двигатель такого типа называют двухпозиционным.
Существуют различные варианты исполнения двигателей с ограниченным перемещением, но в них обязательно имеются постоянные магниты, подвижные или неподвижные.
 Статор
двигателя может состоять из магнитного тороидального сердечника с двумя
обмотками, создающими противоположные по знаку магнитные потоки (рис.3.45- б).
Если на обмотки возбуждения подается напряжение, ротор занимает вертикальное положение,
поворачиваясь в направлении, задаваемом магнитными потоками обмоток и
постоянного магнита. При определенном размещении витков в обмотке можно
получить постоянный вращающий момент в большом диапазоне перемещений.
При такой конструкции невозможно удержание ротора в определенном положении
при отсутствии тока.
Статор
двигателя может состоять из магнитного тороидального сердечника с двумя
обмотками, создающими противоположные по знаку магнитные потоки (рис.3.45- б).
Если на обмотки возбуждения подается напряжение, ротор занимает вертикальное положение,
поворачиваясь в направлении, задаваемом магнитными потоками обмоток и
постоянного магнита. При определенном размещении витков в обмотке можно
получить постоянный вращающий момент в большом диапазоне перемещений.
При такой конструкции невозможно удержание ротора в определенном положении
при отсутствии тока.
Один из вариантов двигателей с ограниченным углом поворота и обмоткой, расположенной на роторе, показан на рис. 3.45 - в. Этот двигатель состоит из постоянных магнитов 3, магнитопровода 2, подводящего магнитный поток к равномерному воздушному зазору, и обмотки 1, жестко закрепленной на приводимой двигателем нагрузке. Для устранения скользящих контактов обмотка соединяется с источником энергии гибким токопроводом.
Линейные двигатели
Применение линейных двигателей упрощает привод при поступательном движении, при этом совмещается магнитная система двигателя с подвижным элементом и исключаются все кинематические преобразователи движения. Линейный двигатель принципиально любого типа может быть образован из вращательного путем разрезания вдоль оси и развертки его на плоскость движения. По способу преобразования электрической энергии в механическую линейные двигатели делятся на двигатели постоянного и переменного тока (асинхронные и синхронные). Линейные двигатели постоянного тока имеют развернутые коллекторы, что усложняет их конструкцию и ограничивает применение.
Бесконтактные линейные ШД получили наибольшее применение. Линейные шаговые двигатели могут выполняться как плоскими, так и цилиндрическими. Последние конструктивно повторяют двигатели вращательного движения, но подвижный элемент совершает возвратно-поступательное движение.
Скорость ЛШД определяется
зубцовым делением ![]() и частотой
и частотой ![]() переключения фаз:
переключения фаз: ![]()
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.


