Решение:
|
|
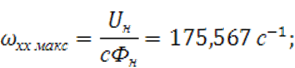
Найдём
угловую скорость двигателя: ![]() .
.
|
|
|
|
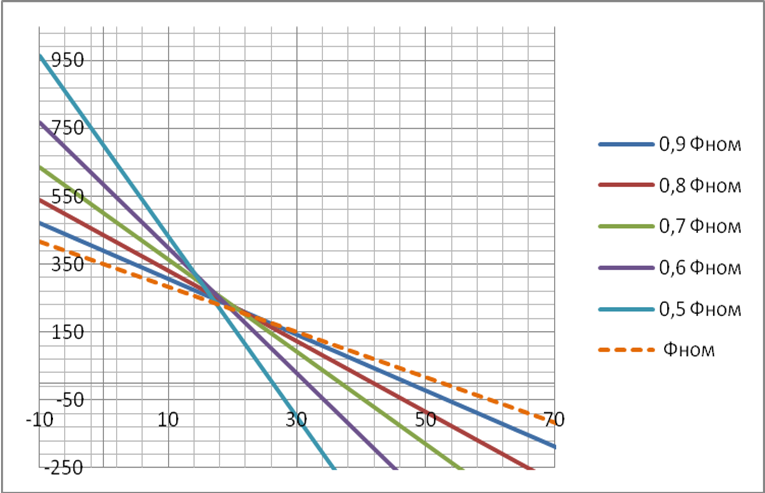
Теперь построим естественную и искусственные характеристики двигателя:
А) для случая U=Uном, Ф=(0,9; 0,8; 0,7; 0,6; 0,5)Фном:
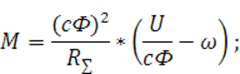
Механическая
характеристика:![]()
|
0,9Фном |
0,8Фном |
0,7Фном |
0,6Фном |
0,5Фном |
Фном |
M |
|
469,7293827 |
539,9983 |
634,1164 |
766,2088 |
963,8132 |
415,3627 |
-10 |
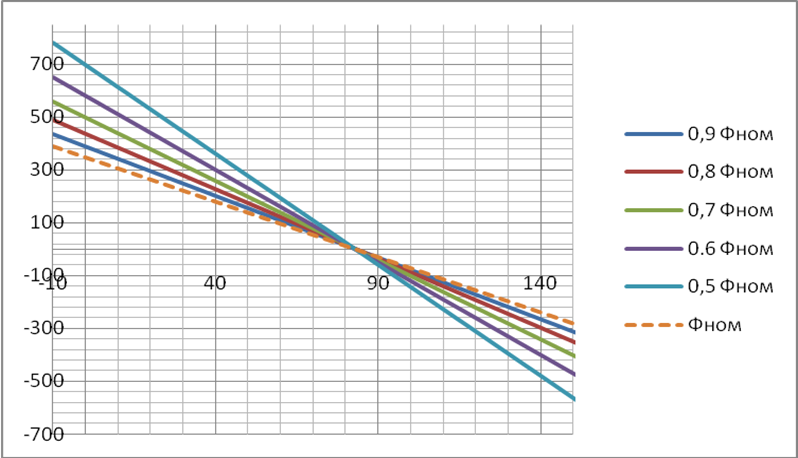
Электромеханическая
характеристика:![]()
|
0,9Фном |
0,8Фном |
0,7Фном |
0,6Фном |
0,5Фном |
Фном |
I |
|
434,2089 |
488,485 |
558,2686 |
651,3134 |
781,576 |
390,788 |
-10 |
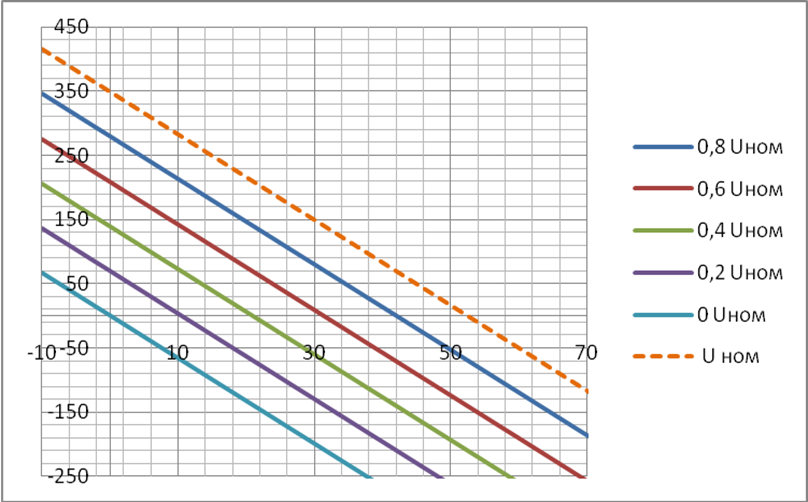
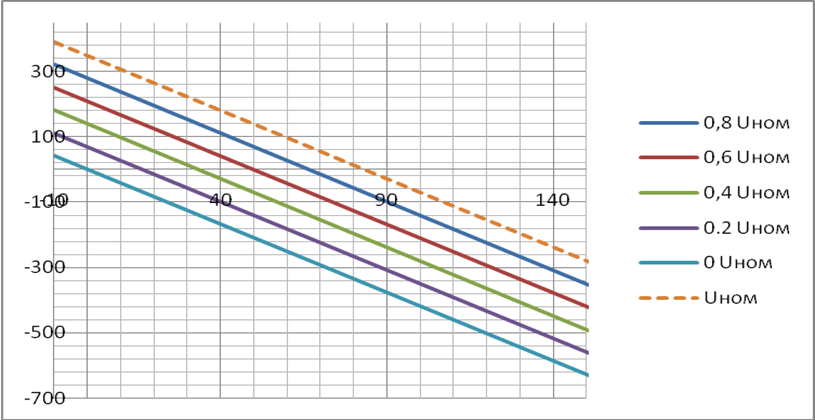
Б) для случая U=(0,8; 0,6; 0,4; 0,2; 0)Uном, Ф=Фном:
Механическая характеристика:
|
0,8Uном |
0,6Uном |
0,4Uном |
0,2Фном |
0 Uном |
Uном |
M |
|
345,5989227 |
275,8352 |
206,0714 |
136,3077 |
66,5439 |
415,3627 |
-10 |
Электромеханическая характеристика:
|
0,8Uном |
0,6Uном |
0,4Uном |
0,2Фном |
0 Uном |
Uном |
I |
|
321,0243 |
251,2605 |
181,4967 |
111,733 |
41,96924 |
390,788 |
-10 |
Определим жёсткость механических характеристик двигателя:
Преобразуем уравнение механической характеристики:
Жесткость:
![]()
|
|
Для случая U=Uном, Ф=(0,9; 0,8; 0,7; 0,6; 0,5)Фном:
|
Ф |
β |
|
Фном |
-0,150277 |
|
0,9 Фном |
-0,121724 |
|
0,8 Фном |
-0,096177 |
|
0,7 Фном |
-0,073636 |
|
0,6 Фном |
-0,0541 |
|
0,5 Фном |
-0,037569 |
Определим достижимый диапазон регулирования скорости двигателя при Ф=Фном и допустимом значении статической ошибки регулирования равной 40%:
Диапазон
регулирования: ![]()
|
![]() находим
используя переменную часть механической характеристики и значения заданной
допустимой статической ошибки:
находим
используя переменную часть механической характеристики и значения заданной
допустимой статической ошибки:
|
|
2. Рассчитать и построить механические характеристики двигателя для схемы включения якорной цепи двигателя, показанной на рисунке:
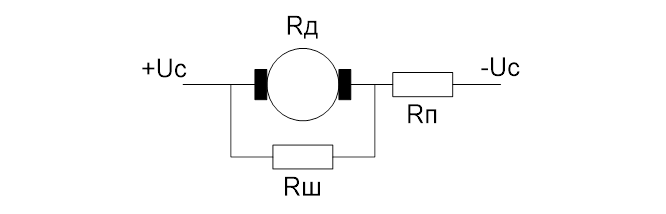
Где Rп=0,5Rном, Rш= (0; 0,1; 0,3; 0,5; 1)Rном и Rш=Rном, Rп=(0; 0,1; 0,3; 0,5; 1) Rном.
По 1-ому и 2-ому закону Кирхгофа получим систему уравнений:
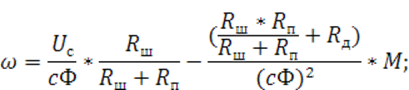
Преобразуем систему так, чтобы получить зависимость ω(М):



|
|

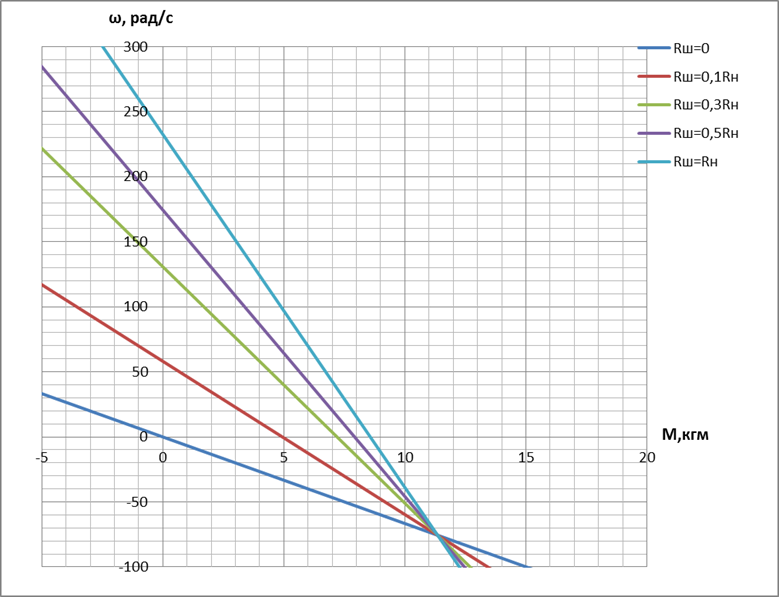
Теперь построим механическую характеристику двигателя:
А) для случая Rп=0,5Rном, Rш=(0; 0,1; 0,3; 0,5; 1)Rном:
|
M |
Rш=0 |
Rш=0,1Rн |
Rш=0,3Rн |
Rш=0,5Rн |
Rш=Rн |
|
0 |
0 |
58,13646 |
130,807 |
174,4094 |
232,5458 |
Б) для случая Rп=(0; 0,1; 0,3; 0,5; 1)Rном, Rш=Rном:
|
M |
Rп=0 |
Rп=0,1Rн |
Rп=0,3Rн |
Rп=0,5Rн |
Rп=Rн |
|
0 |
348,8188 |
317,108 |
268,3221 |
232,5458 |
174,4094 |
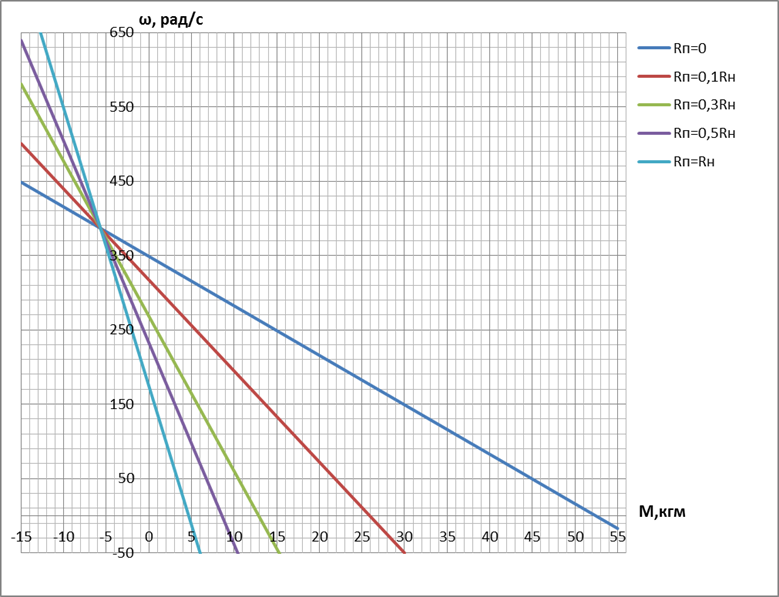
Вывод:
Путём увеличения величины последовательного сопротивления в якорной цепи я уменьшил скорость вращения вала двигателя. С понижением скорости уменьшается жёсткость характеристик, из за чего ухудшается стабильности работы двигателя: незначительное изменение момента значительно повлияет на скорость вращения. Путём уменьшения величины параллельного сопротивления в якорной цепи уменьшается скорость вращения вала двигателя. Так же с уменьшением скорости жесткость системы будет расти, что положительно скажется на стабильности работы двигателя. Наличие как параллельного, так и последовательного сопротивления приводит к возрастанию потерь.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.