Таким
образом, единственной возможностью уменьшить погрешность преобразования
информации при дискретизации, является установка идеального фильтра с полосой
пропускания ![]() на выходе ИИЭ (рис. 4. 3). Поскольку
идеальный фильтр физически невозможно построить, то применяют реальный
фильтр - экстраполятор.
на выходе ИИЭ (рис. 4. 3). Поскольку
идеальный фильтр физически невозможно построить, то применяют реальный
фильтр - экстраполятор.
Экстраполяторы бывают разных порядков: экстраполятор 0-го порядка экстраполирует (т.е. запоминает) значение решётчатой функции e[nT], в момент квантования непрерывнойфункции e(t) ИИЭ, на часть (γΤ) или весь интервал квантования Т (Рис 8.3). Экстраполятор 1-го порядка,
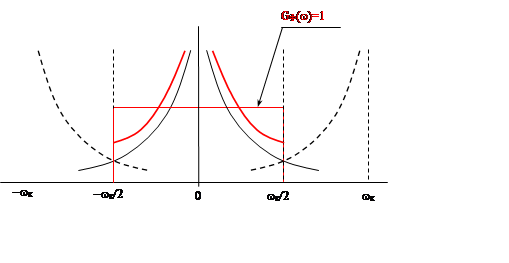
Рис. 4. 3.
кроме такого же запоминания функции e[nT], запоминают первую прямую разность РФ, вычисленную на предыдущем интервале Δ e[(n-1), T], и добавляет её к сигналу e[nT]. Известны экстраполяторы и более высоких порядков.
На рис. 5. 3 изображена функциональная схема типовой импульсной системы (ИС). Блок экстраполятора Э включен на выходе ИИЭ. Выборка РФ

Рис.5. 3.
осуществляется
фиктивным ИИЭ из непрерывного сигнала ![]() . Время исчисляется в относительных единицах
. Время исчисляется в относительных единицах ![]() .
.
1.6. Математическая модель экстраполятора нулевого порядка
Повторяю, что идеальный фильтр с АЧХ
(амплитудно-частной характеристикой) A(w)=1 в пределах ![]() и ФЧХ (фазо - частной
характеристикой) j (ω)=0 построить невозможно. Поэтому рассмотрим характеристики реального
фильтра нулевого прядка, построенного на основе прямоугольного импульса. Модель
его получения показана на рис. 6. 3.
и ФЧХ (фазо - частной
характеристикой) j (ω)=0 построить невозможно. Поэтому рассмотрим характеристики реального
фильтра нулевого прядка, построенного на основе прямоугольного импульса. Модель
его получения показана на рис. 6. 3.
![]()
![]()
![]()
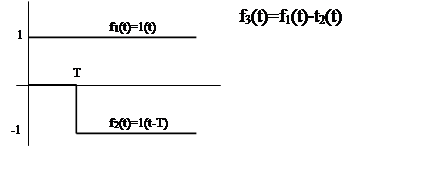
Рис. 6. 3.
Таким образом, экстраполированная функция на одном периоде определяется разностью двух единичных функций. Тогда вычислим и передаточную функцию такого экстраполятора по следующим формулам:
 ,
(3. 3)
,
(3. 3)
c запоминанием на полный интервал квантования.
![]() ,
(4. 3)
,
(4. 3)
c
запоминанием на часть ![]() интервала квантования.
интервала квантования.
В
этих формулах в качестве входного сигнала экстраполятора принята ![]() , которая формируется на выходе
ИИЭ.
, которая формируется на выходе
ИИЭ.
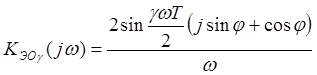
Получим частотные характеристики такого фильтра (4. 3.):
![]() ,
тогда
,
тогда

Итак,
ФЧХ![]() .
.
 ;
Модуль AЧХ
;
Модуль AЧХ 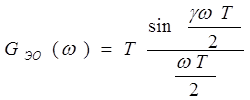 .
.
Рассмотрим
те же характеристики при ![]() :
:
ФЧХ ![]() ; Модуль АЧХ
; Модуль АЧХ  . (5.
3.)
. (5.
3.)
Таблица 1
Данные расчета АФХ экстраполятора нулевого порядка
|
w |
0 |
wК/2 |
wК |
1,5 wК |
2 wК |
2,5 wК |
3 wК |
|
G(w) |
1 |
0,63 |
0 |
0,21 |
0 |
0,12 |
0 |
|
j(w) |
0 |
-p/2 |
-p |
-1,5p |
-2p |
-2,5p |
-3p |
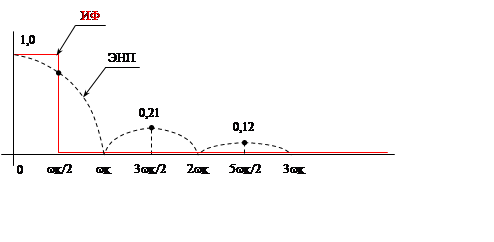
Рис. 7. 3.
Таким образом, получили, что характеристики реального фильтра - экстраполятора нулевого порядка отличаются от характеристик идеального фильтра. Но, в итоге, мы уменьшили погрешность преобразования информации в ДСАУ за счет существенного подавления, как боковых составляющих спектра РФ, так и их перекрытий..
1.7. Функциональная схема цифровой системы управления (ЦСУ)
До сих пор мы рассматривали функциональные схемы дискретных импульсных систем. Но какое отношение они имеют к современной реальной практике? Ведь известно, что подавляющее большинство современных ДСАУ построены как цифровые системы управления (ЦСУ). Попробуем разобраться в этом далеко непростом вопросе.

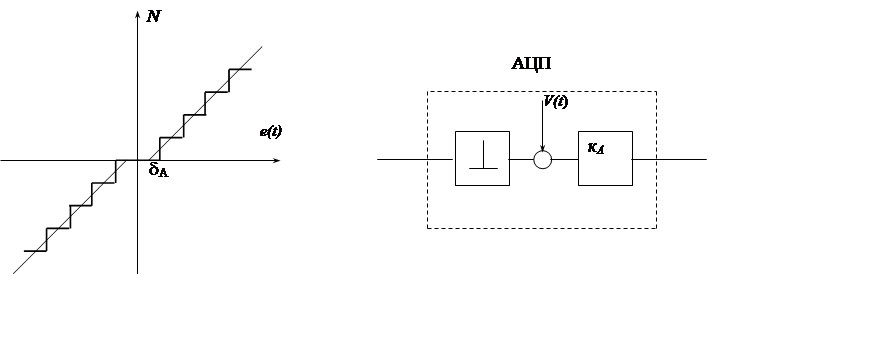
Рис. 8.3.
На рис.8.3 изображена функциональная схема реальной ЦСУ. Здесь принято: АЦП – аналого-цифровой преобразователь, ДР – дискретный регулятор, ЦАП – цифро - -аналовый преобразователь, НЧ – непрерывная часть САУ. Пока нас не интересует, как программно реализован ДР и на базе, каких промышленных контроллеров или иных вычислительных устройств? Не раскрыт и состав блоков НЧ. Это вопросы последующих лекций. По существу же ЦСУ является нелинейной дискретной САУ. Её нелинейности создают преобразователи АЦП и ЦАП.
Математическая модель АЦП представляет собой многопозиционного релейного устройства. Число позиций реле k (АЦП) и максимальное число выхода преобразователя Nмакс (в десятичном коде) определяются формулой :Nмакс=2к-1.
e(t) e[nT]
Т
а) б)
Рис. 9. 3.
На рис. 9. 3, а изображена статическая
характеристика АЦП. Её можно линеаризовать "секущей",
если пренебречь уменьшением вдвое зоны нечувствительности при ![]() . Тогда коэффициент передачи
преобразователя можно считать таким:
. Тогда коэффициент передачи
преобразователя можно считать таким:![]() .
Динамическую погрешность АЦП, вызванную отклонением его реальной
"пилообразной " характеристики от идеальной "секущей" v(t)
можно считать случайным стационарным сигналом (помехой) с
известными статистическими характеристиками[28].
.
Динамическую погрешность АЦП, вызванную отклонением его реальной
"пилообразной " характеристики от идеальной "секущей" v(t)
можно считать случайным стационарным сигналом (помехой) с
известными статистическими характеристиками[28].
На рис. 9. 3, б изображена динамическая модель АЦП. Она представляет собой последовательное соединение ИИЭ и масштабирующего усилителя с коэффициентом передачи kA. На вход ИИЭ подается сигнал ex(t). На выходе ИИЭ сумма аналоговых сигналов ex(t)+v(t), в моменты квантования3), формируют число Nx, которое можно записать как РФ вида Nx [nT].
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.