

Санкт-Петербургский Государственный Политехнический Университет
Факультет Технической Кибернетики
Кафедра Компьютерных Систем и Программных Технологий
Отчет
по лабораторной работе №0
Введение в Simulink
Моделирование систем управления
Работу выполнила:
группа 4081/11
Преподаватель: .
Подпись преподавателя:___________________
Санкт-Петербург
2011
1. Редактор моделей
В Simulink была построена следующая модель:
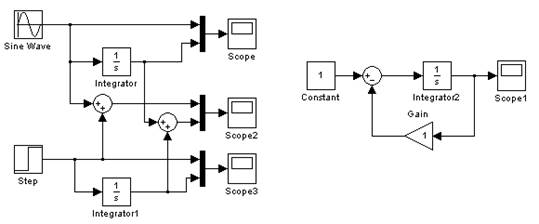
Рис. 1.1. Модель в Simulink
Для ее построения были использованы следующие блоки: SineWave (источник синусоидального воздействия), Step (источник одиночного перепада), Integrator (интегрирующий блок), Sum (блок суммирования), Scope (осциллограф для наблюдения временных и иных зависимостей), Constant(источник постоянного воздействия) и Gain(блок масштабирования).
2. Изучение блоков Sources(источники сигналов и воздействий)
Будем изменять параметры источников сигналов и воздействий, моделировать систему и приводить графики на выходах системы.
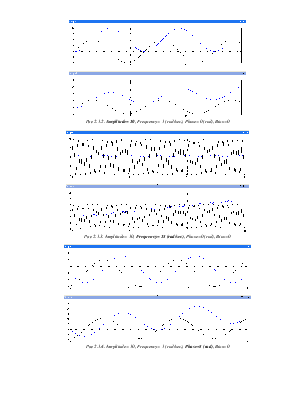
2.1. Изучение источника синусоидального воздействия (sine wave)
Источник формирует выходной синусоидальный сигнал: out(t) = Amp*sin(Freq*t+Phase)+Bias. Все эти параметры можно задать в настройках источника.
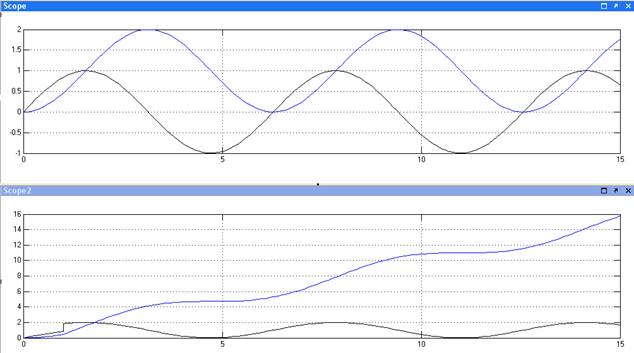
Рис 2.1.1. Amplitude= 1, Frequency= 1 (rad/sec), Phase=0 (rad), Bias=0 - настройкипоумолчанию
Параметр Amplitude позволяет задать амплитуду выходного сигнала, Frequency – частоту сигнала, Phase – сдвиг фазы относительно сигнала по умолчанию, Sample time – эталонное время, которое используется для согласования работы источника и других компонентов модели во времени.
Изменим эти параметры и будем наблюдать результат на графиках.
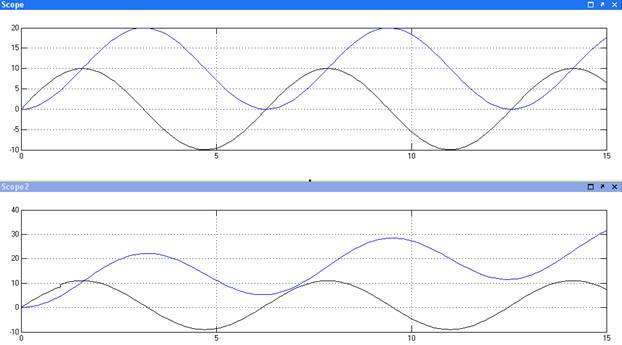
Рис 2.1.2. Amplitude= 10, Frequency= 1 (rad/sec), Phase=0 (rad), Bias=0
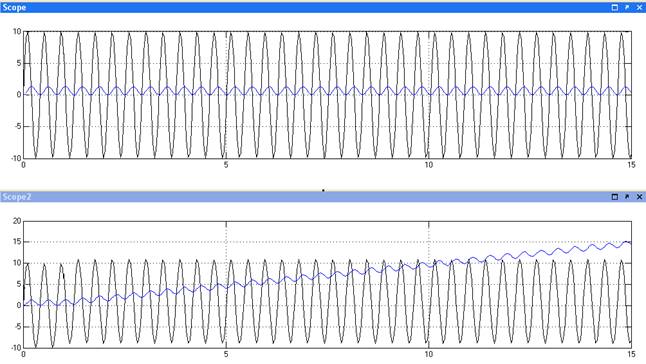
Рис 2.1.3. Amplitude= 10, Frequency= 15 (rad/sec), Phase=0 (rad), Bias=0
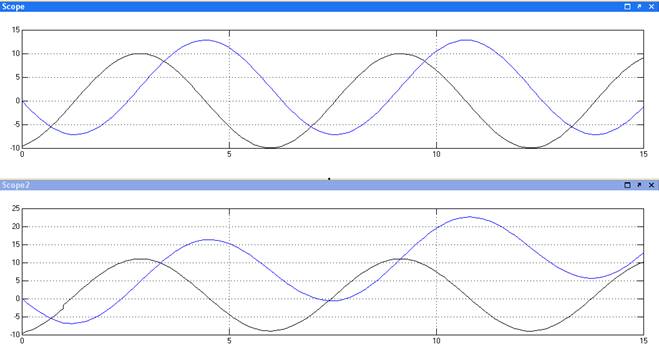
Рис 2.1.4. Amplitude= 10, Frequency= 1 (rad/sec), Phase=5 (rad), Bias=0
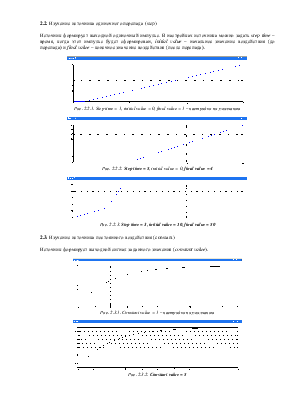
2.2. Изучение источника одиночного перепада (step)
Источник формирует выходной одиночный импульс. В настройках источника можно задать steptime – время, когда этот импульс будет сформирован, initialvalue – начальное значение воздействия (до перепада) и finalvalue – конечное значение воздействия (после перепада).
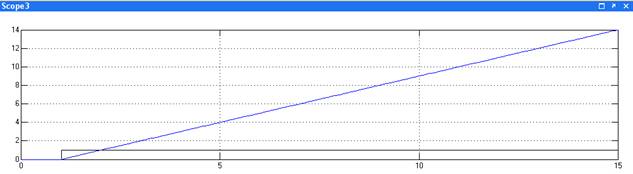
Рис. 2.2.1. Step time = 1, initial value = 0, final value = 1 – настройкипоумолчанию
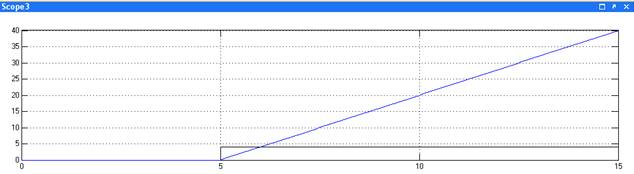
Рис. 2.2.2. Step time = 5, initial value = 0, final value = 4
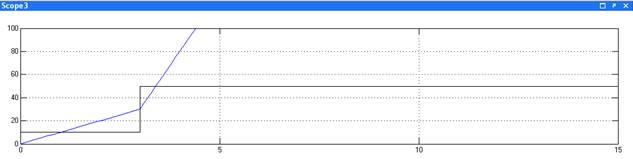
Рис. 2.2.3. Step time = 3, initial value = 10, final value = 50
2.3. Изучение источника постоянного воздействия (constant)
Источник формирует выходной сигнал заданного значения (constantvalue).
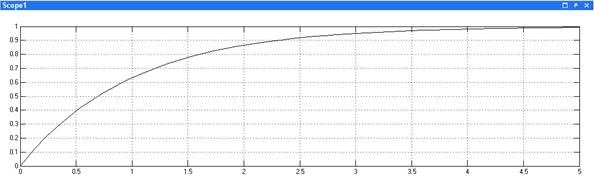
Рис. 2.3.1. Constantvalue = 1 – настройки по умолчанию
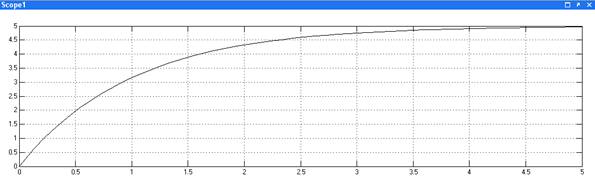
Рис. 2.3.2. Constant value = 5
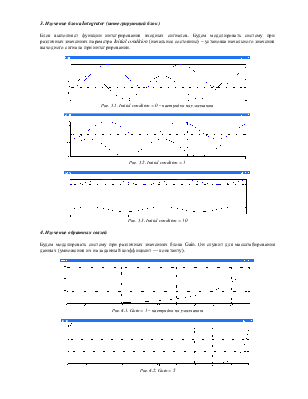
3. Изучениеблока Integrator (интегрирующийблок)
Блок выполняет функции интегрирования входных сигналов. Будем моделировать систему при различных значениях параметра Initialcondition (начальное состояние) – установка начального значения выходного сигнала при интегрировании.
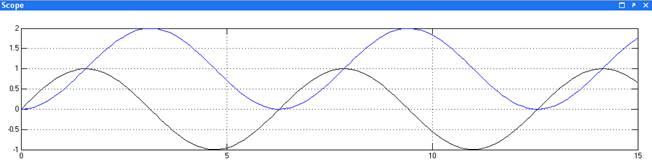
Рис. 3.1. Initialcondition = 0 – настройки по умолчанию
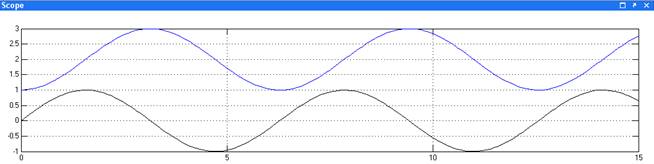
Рис. 3.2. Initialcondition = 1
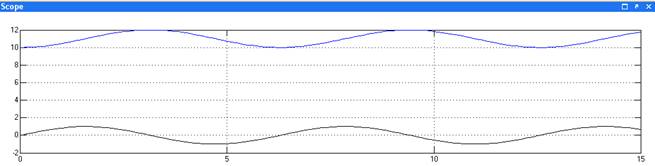
Рис. 3.3. Initialcondition = 10
4. Изучение обратных связей
Будем моделировать систему при различных значениях блока Gain. Он служит для масштабирования данных (умножения их на заданный коэффициент — константу).
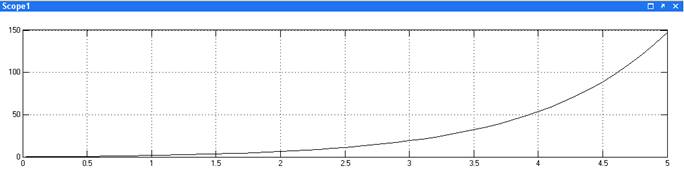
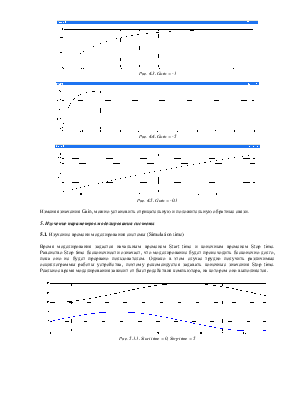
Рис. 4.1. Gain = 1 – настройки по умолчанию
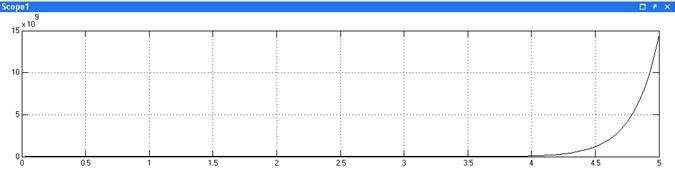
Рис. 4.2. Gain = 5
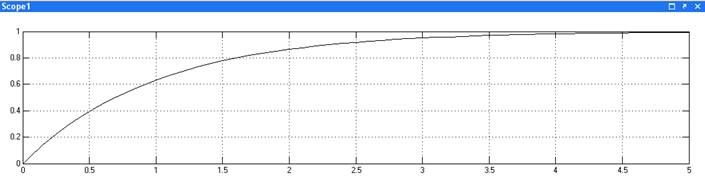
Рис. 4.3. Gain = -1
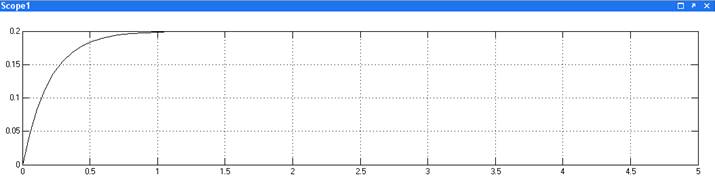
Рис. 4.4. Gain = -5
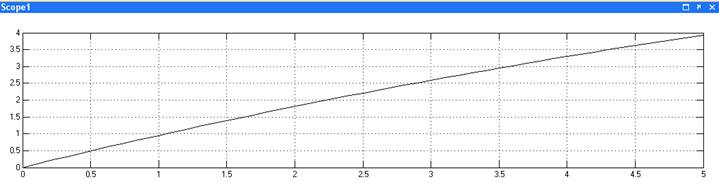
Рис. 4.5. Gain = -0.1
Изменяя значения Gain, можно установить отрицательную и положительную обратные связи.
5. Изучение параметров моделирования системы
5.1. Изучение времени моделирования системы (Simulation time)
Время моделирования задается начальным временем Start time и конечным временем Stop time. Равенство Stop time бесконечности означает, что моделирование будет происходить бесконечно долго, пока оно не будет прервано пользователем. Однако в этом случае трудно получить различимые осциллограммы работы устройства, поэтому рекомендуется задавать конечные значения Stop time. Реальное время моделирования зависит от быстродействия компьютера, на котором оно выполняется.
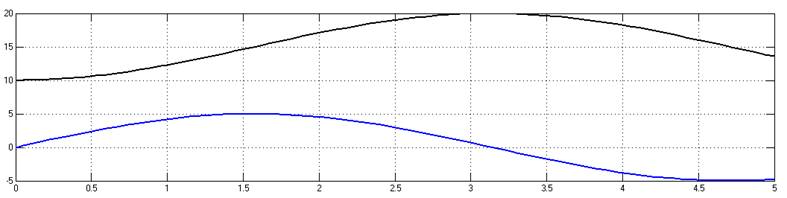
Рис. 5.1.1. Start time = 0, Stop time = 5
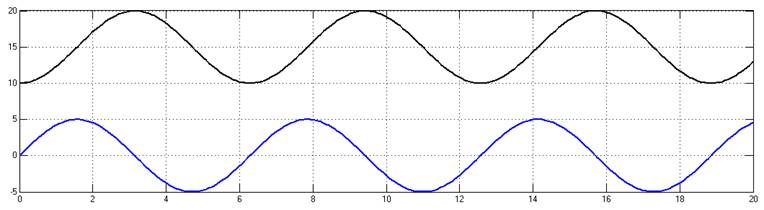
Рис. 5.1.1. Start time = 0, Stop time = 20
5.2. Изучение типа решения
Возможны два типа решения:
- Variable-step solvers — решение с переменным шагом;
- Fixed-step solvers — решение с фиксированным шагом.
В случае решения с переменным шагом по времени шаг автоматически уменьшается, если скорость изменения результатов в процессе решения возрастает. И напротив, если результаты меняются слабо, шаг решения автоматически увеличивается.
Метод с фиксированным шагом стоит применять тогда, когда фиксированный шаг обусловлен спецификой решения задачи (например, если ее цель заключается в получении таблицы результатов с фиксированным шагом).
В нашем примере оба типа решения дают одинаковые результаты на графиках.
5.3. Изучение метода моделирования
Для решения дифференциальных уравнений можно выбрать следующие методы: discrete (дискретный), ode45, ode23 и т. д. Методы, в наименовании которых имеется слово stiff, служат для решения жестких систем дифференциальных уравнений.
Дискретный метод решения для данной модели не может быть использован, так как в ней присутствуют continious-блоки.
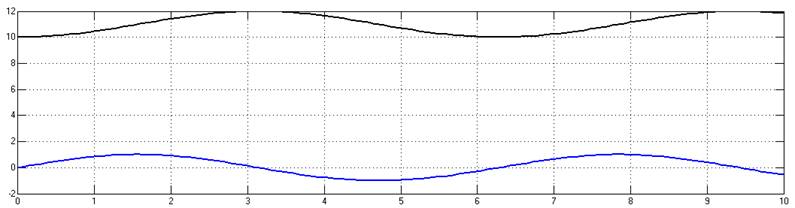
Рис. 5.3.1. Методы решения ode45, ode23, ode113, ode15sв нашем случае дают
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.