По результатам расчета строится динамическая характеристика при полной массе mа автомобиля (рис. 4.2).
По оси абсцисс в принятом масштабе откладывают без учета буксования значения скорости движения автомобиля на каждой передаче при работе двигателя с частотой вращения коленчатого вала соответственно nmin, nм, (nм+nн)/2, nн, которая вычисляется по (4.6). Для удобства пользования динамической характеристикой при решении практических задач скорость автомобиля принимают в м/с и км/ч (1 м/с=3,6 км/ч). Из полученных точек в принятом масштабе (аа) по оси ординат откладывают ординаты динамического фактора Dа при mа для каждой скорости на всех передачах и соединяют их плавными кривыми. Полученные графические зависимости на каждой передаче в совокупности представляют динамическую характеристику автомобиля с полной нагрузкой.
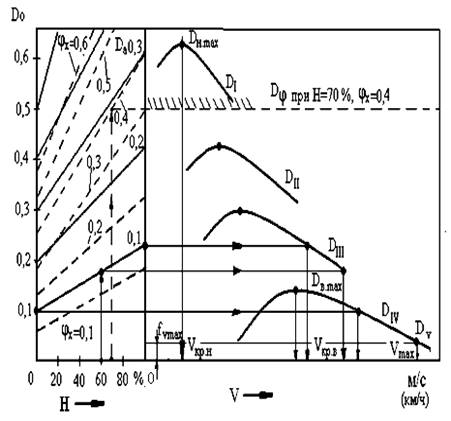
Рисунок 4.2 – Динамический паспорт автомобиля
Для учета влияния нагрузки (mг) на величину динамического фактора динамическую характеристику следует дополнить номограммой нагрузок. Для этого ось абсцисс динамической характеристики продолжают влево (рис. 4.2) и наносят на ней шкалу относительной нагрузки Н=mгi/mг*100 при изменении массы груза от 0 до mг=1. Через нулевую точку шкалы нагрузок проводят прямую, параллельную оси Dа и на ней наносят шкалу динамического фактора Dо для массы снаряженного автомобиля mо. Величина масштаба ао для шкалы Dо определяется из соотношения ао=ааmа/mо.
Равнозначные деления шкал Dо и Dа (например, 0,05; 0,1; 0,2 и т.д.) соединяют между собой прямыми линиями.
Для определения возможности буксования ведущих колес при различных нагрузках на автомобиль рассчитывают значения динамических факторов по сцеплению Dаφ и Dоφ соответственного груженого и снаряженного автомобиля для различных значений коэффициента сцепления φх
 (4.16)
(4.16)
Для полноприводного автомобиля сцепная масса mφ=ma и moφ=mo. У неполноприводных автомобилей mφ и mоφ определяют по результатам тягового расчета.
Значения ![]() и
и ![]() при
при ![]() =0,1; 0,2; 0,3 и т.д. откладывают
соответственно на шкале
=0,1; 0,2; 0,3 и т.д. откладывают
соответственно на шкале ![]() и
и ![]() и соединяют прямой пунктирной линией, на
которой указывают величину
и соединяют прямой пунктирной линией, на
которой указывают величину ![]() .
.
Динамическая характеристика с номограммой нагрузок и графиком контроля буксования называется динамическим паспортом автомобиля (рис. 4.2). Пользуясь динамическим паспортом, можно решать любые задачи по оценке тягово-скоростных свойств автомобиля.
На рисунке 4.2 показано определение Vmax груженого
автомобиля при ![]() , а также рабочей передачи и скорости
равномерного движения снаряженного (mo), частичного (60
%) и полностью (100 %) груженого автомобиля при
, а также рабочей передачи и скорости
равномерного движения снаряженного (mo), частичного (60
%) и полностью (100 %) груженого автомобиля при ![]() . При нагрузке Н=70 % и
. При нагрузке Н=70 % и ![]() для неполноприводного автомобиля
для неполноприводного автомобиля ![]() .
.
При равномерном движении автомобиля D динамический фактор
![]() . (4.17)
. (4.17)
Динамический фактор Dv определяет
возможность достижения максимальной скорости автомобиля Vmax в заданных
дорожных условиях при i=0 и ![]() . При этом должно выполнятся условие
. При этом должно выполнятся условие ![]() .
.
Тягово-скоростные свойства автомобиля-тягача и формируемого на его основе автопоезда существенно различаются. Основное влияние на них оказывает масса автопоезда, так как она непосредственно определяет величину дорожного сопротивления и сопротивления разгону. Сопротивление воздуха автопоезда с одним прицепом на 25-30 % выше, чем у тягача, и увеличивается на 15-20 % при добавлении каждого последующего прицепа. При этом увеличивается момент Мв, подводимый к ведущим колесам, что приводит к возрастанию мощности потерь на упругое скольжение и внешнее проскальзывание шин. Это обычно учитывают посредством увеличения значений коэффициента сопротивления качению на 5-10 %.
Для анализа тягово-скоростных свойств автопоезда можно использовать динамическую характеристику автомобиля-тягача, дополнив ее номограммой нагрузки и номограммой контроля буксования (рис. 4.3). Используя выражение (4.15), составим приближенное соотношение между динамическими факторами автопоезда Dап и автомобиля-тягача Dа:
![]() . (4.18)
. (4.18)
Снижение динамического фактора Dап по сравнению с Dа приводит к уменьшению скорости и преодолеваемого уклона. Снижается также динамический фактор по сцеплению. Для автопоезда его можно определить, подставив в формулу (4.16) mап вместо ma:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.