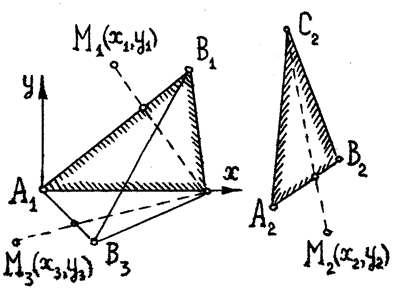
Итак, конкретное аффинное преобразование плоскости можно задать путем предъявления двух произвольных треугольников (как прообраз и образ). Пусть это будут те же ∆А1В1С1 и ∆А2В2С2 , что и на рис.58. Введем декартову координатную систему с центром в точке А1, направляя ось х вдоль отрезка А1С1 (рис.59). Пусть для заданной произвольной точки М1(х1, y1) образом окажется точка М2(х2, y2).
|
|
Будем искать зависимость между
их координатами, считая аффинное преобразование «разложенным» на две
компоненты: А = Р |
Рис.59
1) Родство F : ∆А1В1С1 → ∆А1В3С1 даст для точки М1(х1, y1) некоторый «промежуточный» образ М3(х3, y3). Расположение оси х вдоль оси А1С1 родства позволяет применить уравнения вида (17):
2) Подобие Р : ∆А1В3С1 → ∆А2В2С2 отобразит М3(х3, y3) в точку М2(х2, y2), причем расположение координатных осей по отношению к треугольникам является таким же (рис.42), как и при выводе системы аналитического представления подобия (11). Поэтому получим
 .
.
Сочетая эти системы уравнений, можно найти сквозь два этапа преобразований искомую зависимость между координатами в виде
 (18)
(18)
Обилие числовых параметров в уравнениях напоминает нам о представлении подобия в виде композиции гомотетии (коэффициент k) и движения, которое, в свою очередь, «распадалось» на осевую симметрию (если она понадобилась, то берем ε=-1, если нет, то ε=1), поворот (на угол α) и параллельный перенос (с координатами a, b). Иначе говоря, более «подробным» представлением аффинного преобразования, переводящего заданные ∆А1В1С1 в ∆А2В2С2 , будет
![]() .
.
В новых обозначениях а1= kcosα , a2 = kλcosα – kεμsinα , b1=ksinα , b2=kλsinα + kεμcosαсистема (18) превращается в
 (19)
(19)
(аналитическое представление аффинного преобразования).
Определитель этой системы не равен нулю:
 (20)
(20)
Действительно, после упрощения выражения
∆ = k cosα (λksinα + εkμcosα) - ksinα (λkcosα - εkμsinα)
получим значение ∆ = k2εμ
. Оно не может «обнулиться», поскольку k ≠ 0
(коэффициент гомотетии), ε = ![]() 1, μ = m1/m2 ≠ 0, так
как точка В1(q1, m1) (одна из двух, задававших преобразование
родства) не лежит на оси родства, то есть m1
≠ 0 .
1, μ = m1/m2 ≠ 0, так
как точка В1(q1, m1) (одна из двух, задававших преобразование
родства) не лежит на оси родства, то есть m1
≠ 0 .
Замечание 1. Всякое аффинное преобразование плоскости аналитически задается линейной системой уравнений (19), причем невырожденной .
Невырожденность (20) означает возможность обращения матрицы системы (19), то есть получения обратной зависимости «старых» координат от «новых» в некотором виде (21):
 (21)
(21)
Это обратное преобразование будет, в частности, отображать «второй» треугольник ∆А2В2С2 в “первый” ∆А1В1С1.
Рассмотрим теперь утверждение, обратное к замечанию 1.
Замечание 2. Всякая линейная система (19) при условии (20) задает на плоскости некоторое аффинное преобразование.
Доказательство. Покажем, что отображение точек плоскости по правилам (19)-(20) будет удовлетворять определению аффинного преобразования, то есть сохранит в образах коллинеарность и простое отношение трех точек прямой.
1) Коллинеарность сохранится, если любая прямая перейдет снова в прямую. Любая прямая на плоскости задается некоторым уравнением Ах + Вy + С = 0 . Пусть точка с координатами х1 , у1 , принадлежащая этой прямой (т.е. Ах1 + Вy1 + С = 0), отобразилась в х2, у2 . Используя обратное преобразование (21), получим А(v1x2+v2y2+v)+B(w1x2+w2y2+w)+C=0, что в обозначениях Av1+Bw1=A* , Av2+Dw2=B* , Av+Bw+C=C* равносильно условию A*x2+B*y2+C*=0 принадлежности образов к новой прямой. Итак, прямая отобразилась в прямую. Ч.т.д.
2) Сохранение простого отношения проверяем для произвольных трех точек А(хА, уА), В(хВ, уВ), С(хС, уС) одной прямой.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.