Минимальная толщина обода, обеспечивающая изгибную прочность сателлита:
hg³0.5m×![]() =0.5×3×
=0.5×3×![]() =7,8 мм
=7,8 мм
12. Диаметр отверстия под подшипник:
D'=(df)g -2hg = 73,5 - 2 × 7,8 = 57,9 мм
13. Радиальная нагрузка, воспринимаемая наиболее нагруженной опорой сателлита:
Fr=4TaW/(da)nwnm = 4×487,8×1,03/81×3×2 = 4135,3 Н
где: число подшипников в опоре nm=2.
14. Приведённая радиальная нагрузка:
P=VFrKбKT
где: V - коэффициент вращения кольца подшипника относительно вектора нагрузки V=1,2
Kб - коэффициент безопасности
KT - температурный коэффициент KT=1
Параметры V, Kб, Кт приняты в соответствии с рекомендациями по подбору подшипников.
P = 1,2×4135,3×1,3×1 = 6451 Н
15. Расчётное значение динамической грузоподъёмности подшипника:
Срасч=P×[LE/(nзам+1) ]1/m`/Ккач
где: nзам - число замен подшипников за весь срок службы передачи
Ккач - коэффициент качества подшипников, зависящий от его класса точности, Ккач =1
- показатель степени, зависящий от типа подшипника, m'=3,33-роликовый подшипник, m'=3,0-шариковый подшипник,
Срасч=6451×(26,7/(0+1))1/3,33/1=19260 H
16. По найденным значениям p' и Срасч из [1] стр. 389 выбираем подшипник:
радиально-упорный роликовый однорядный конический подшипник типа 7205 ГОСТ333-79 с параметрами: С1=23400 Н>Срасч=19260 H
D=52 мм; d=25мм; n1=5 000 об/мин >|ng1-nh1|; В=15 мм
17. Фиксирование сателлита относительно подшипников осуществляется дистанционным кольцом и стандартным пружинным кольцом IА52 ГОСТ 13941-80, устанавливаемыми между встроенными подшипниками сателлита.
18. Назначаем основные геометрические параметры щёк водила:
- Dh=m(za+zg)+d+(20¼30)=3×(27+27)+25+30=217 мм;
- th=(0.055¼0.065)db=0,065×243=15,8 мм;
- tn=(1.52)th=1,5×15,8=23,7 мм;
- dh=(da)+10=87+10=97 мм.
Найденные значения округляем до ближайших нормальных размеров из ряда Ra40.
Dh=220 мм; th=16мм; tn=24 мм; dh=95 мм.
19. Для осевого фиксирования оси сателлита используются два пружинных кольца IБ25 ГОСТ 13940 - 80
Быстроходная ступень
1. Предложено спроектировать узел сателлита, минимальный по габаритам, удовлетворяющий критериям контактной и изгибной выносливости зубьев и работоспособности подшипника сателлита. Исходные данные представлены в таблице.
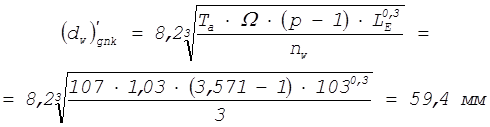
2. Определяем минимальный
диаметр сателлита, обеспечивающий работоспособность встроенного подшипника. При
расчете принимается эквивалентное число оборотов подшипника ![]() млн.об.
млн.об.
![]() млн.об.
млн.об.
Таблица 5
Исходные данные для проектирования
|
Наименование параметров |
Условное обозначение |
Величина |
Размерность |
|
Maксимальный момент на центральном колесе |
Та |
107 |
Н×м |
|
Коэффициент неравномерности нагрузки между сателлитами |
W |
1.03 |
- |
|
Число сателлитов |
nw |
3 |
- |
|
Модуль |
m |
1,75 |
мм |
|
Число зубьев центрального колеса b |
zb |
75 |
- |
|
сателлита g |
zg |
27 |
- |
|
центрального колеса а |
za |
21 |
- |
|
Делительный диаметр центрального колеса а, удовлетворяющий изгибной выносливости |
(d)aF |
34,3 |
мм |
|
Диаметр начальной окружности центрального колеса а, удовлетворяющий контактной выносливости |
(d)aH |
36,1 |
мм |
|
Эквивалентное число циклов перемен напряжений сателлита при расчете контактной выносливости |
NHeg |
103×106 |
ч. ц. |
|
Частота вращения сателлитов относительно водила |
|ng-nh| |
912,3 |
об/м |
|
Рабочая ширина зубчатого колеса |
bw |
18 |
мм |
|
Коэффициент формы зуба колеса, лимитирующего изгибную выносливость |
YF |
3,88 |
- |
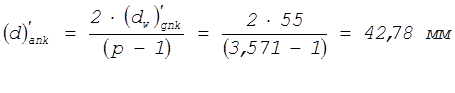
Применение конических
роликовых подшипников в сателлитах позволит снизить ![]() до
55 мм.
до
55 мм.
3. Корректируем все зубчатые
колёса тихоходной ступени, т.к. ![]() =m×Zg=47,25 мм.
=m×Zg=47,25 мм.
4. Модуль зацепления принимаем:
m=1,75
5. Диаметр центрального колеса а:
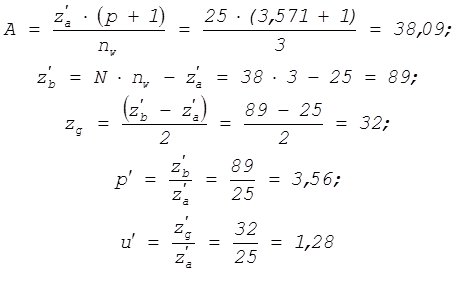
6. Число зубьев центрального колеса а:
![]() ;
;
Принимаем ![]() .
.
7. Числа зубьев ![]() и
и ![]() :
:
![]()
8. Корректируем рабочую ширину колёс:
поскольку ![]() , то:
, то:
т.к. ![]() , то принимаем
, то принимаем ![]() мм;
мм; ![]() мм.
мм.
9. Окончательно:
Za=25;
Zb=89;
Zg=32.
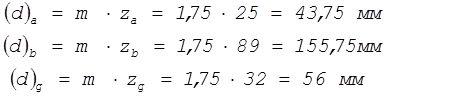
10. Основные диаметры колёс планетарной ступени:
- делительный диаметр (мм)
- диаметр окружности выступов (мм)

![]() - диаметр окружности впадин (мм)
- диаметр окружности впадин (мм)
(df)a =(d)a - 2.5m = 43,75 - 2,5 × 1,75 = 39,38 мм
(df)g =(d)g - 2,5m = 56 - 2,5 × 1,75 = 51,63 мм
(df)b=(d)b + 2,5m = 155,75 + 2,5 × 1,75 = 160,13 мм
- межосевое расстояние (мм)
aw=0.5×[(da) +(d)g ] = 0,5 ×[43,75 + 56] = 49,9мм
11. Минимальная толщина обода, обеспечивающая изгибную прочность сателлита:
hg³0.5m×![]() =0.5×1,75×
=0.5×1,75×![]() =4,95 мм
=4,95 мм
12. Диаметр отверстия под подшипник:
D'=(df)g -2hg = 51,63 - 2 ×4,95 = 41,73 мм
13. Радиальная нагрузка, воспринимаемая наиболее нагруженной опорой сателлита:
Fr=4TaW/(da)nwnm = 4×107×1,03/43,75×3×2 = 1679,4 Н
где: число подшипников в опоре nm=2.
14. Приведённая радиальная нагрузка:
P=VFrKбKT
где: V - коэффициент вращения кольца подшипника относительно вектора нагрузки V=1,2
Kб - коэффициент безопасности
KT - температурный коэффициент KT=1
Параметры V, Kб, Кт приняты в соответствии с рекомендациями по подбору подшипников.
P = 1,2×1679,4×1,3×1 = 2620 Н
15. Расчётное значение динамической грузоподъёмности подшипника:
Срасч=P×[LE/(nзам+1) ]1/m`/Ккач
где: nзам - число замен подшипников за весь срок службы передачи
Ккач - коэффициент качества подшипников, зависящий от его класса точности, Ккач =1
- показатель степени, зависящий от типа подшипника, m'=3,33-роликовый подшипник, m'=3,0-шариковый подшипник,
Срасч=2620×(103/(0+1))1/3,33/1=12263 H
16. По найденным значениям p' и Срасч из [1] стр. 389 выбираем подшипник:
радиально-упорный роликовый однорядный конический подшипник типа 7203 ГОСТ333-79 с параметрами: С1=13500 Н>Срасч=12263 H
D=40 мм; d=17 мм; n1=6300 об/мин >|ng1-nh1|; В=12 мм.
17. Фиксирование сателлита относительно подшипников осуществляется дистанционным кольцом и стандартным пружинным кольцом IА40 ГОСТ 13941-80, устанавливаемыми между встроенными подшипниками сателлита.
18. Назначаем основные геометрические параметры щёк водила:
- Dh=m(za+zg)+d+(20¼30)=1,75×(25+32)+17+20=136,75 мм;
- th=(0.055¼0.065)db=0,055×155,75=8,57 мм;
- tn=(1.52)th=2×8,57=17,14 мм;
- dh=(da)+10=43,75+10=53,75 мм.
Найденные значения округляем до ближайших нормальных размеров из ряда
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.