Вариант – 30. ()
Дано:
М = 1,4
Jн= 20 рад/с
Wн = 1,9 рад/с
eн= 3 рад/с2
Мн = 15 Н*м
dгар = 32'
Расчет мощности и выбор двигателя.
1. Определим требуемую мощность.
Ртр = 2Wн*(Jн*eн+ Мн) = 286 (Вт)
Из условия Рном³Ртр.
Ra = 1,46 Ом
Мном = 3,6 Н*м
Jд = 135*10-4 кг*м
МИ-32
Рном = 370 Вт
nном = 1000 мин-1
Uном = 110 В
Ia = 4,2 А
2. Определим оптимальное передаточное число редуктора.
i0=![]() = 43
= 43
Проверка двигателя по выполненному условию по моменту.
![]() < 2
< 2
Мвозм = (Jд + ![]() )*eн*i0 +
)*eн*i0 + ![]() = 0,662
Н*м
= 0,662
Н*м
![]() < 2 – условие выполнено
< 2 – условие выполнено
Проверка двигателя по выполненному условию по скорости.
wном ³ wтр
wном = ![]() =
= ![]() =
= ![]() = 104,7 (рад/с)
= 104,7 (рад/с)
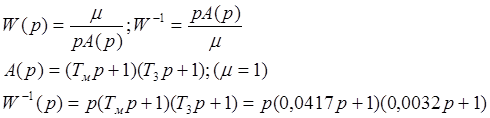
Передаточная функция:
W(P) = ![]() Кд=
Кд=![]()
Се = ![]() = 0,992 Кд » 1 рад/(В*с)
= 0,992 Кд » 1 рад/(В*с)
Тм = ![]() J = Jд
+
J = Jд
+ ![]() =
243*10-4 (кг*м2)
=
243*10-4 (кг*м2)
F = ![]()
Cм = ![]() = 0,857
(
= 0,857
(![]() )
)
F = 0,582 (![]() )
)
Тм = 0,0417 (с)
W(P) = ![]()
Выбор и расчет измерителя рассогласования.
d = 32'
т.к. 20'<(d = 32')>40' выбираем сельсин
Kd = ![]()
Uпит = 60 В.
Kd = ![]() =
19,1 (В/рад)
=
19,1 (В/рад)
Паспортные данные сельсина ДБС – 500.
Режим работы индикаторный, назначение приемник, частота 50 Гц., напряжение возбуждения 127 В., ток возбуждения холостого хода 0,45 А., потребляемая мощность 18 Вт., номинальное напряжение холостого хода 60 Вт., максимальный синхронизирующий момент 1600 Гсм, удельный синхронизирующий момент 9 Гсм/рад, момент трения с возбуждением 16 Гсм, скорость вращения 500 об/мин, диаметр посадочный 100 Х3, длина с выходными концами узлов 160 мм.
Выбор и предварительный расчет усилителя.
Р = (2;5)*Рупр.дв = 3*Рупр.дв = 3*252 = 756 (Вт)
Рупр.дв = Uупр*Iя = 60*4,2 = 252 (Вт)
Так как Р=756 Вт, что гораздо больше, чем 500 Вт, то выбираем тиристорный усилитель.
Схема тиристорного усилителя.
Передаточная функция для тиристорного усилителя.
W(P) = ![]()
Тф = ![]() =
= ![]() = 0,0032 с.
= 0,0032 с.
Определим предварительный коэффициент усиления
Ку = ![]()
Uтроган = ![]() =
= ![]() = 0,6
= 0,6
Ку = ![]() = 3, 357
= 3, 357
d = 32'
= [![]() ] = 0,009 (рад)
] = 0,009 (рад)
W(p) = ![]()
Передаточная функция редуктора
W(p) = Kp = ![]() = 0,0232
= 0,0232
Составим полную структурную схему нескорректированного привода.
 |
|
 |
Передаточная функция разомкнутой системы (нескорректированного привода):
W(p) = Kd * (![]() )
* (
)
* (![]() ) * Kp =
) * Kp = ![]()
Построение ЛАЧХ.
W(p) = ![]()
Заменяем р на jw
W(jw) = ![]()
20lg{ W(jw)} = 20lg 1,4875 – 20lg{jw} – 20lg {0,032jw+1} – 20lg{0,0417jw+1}
20lg 1,4875 = 3,4 (дБ)
w1 = ![]() =
1 (с-1)
=
1 (с-1)
lgw1 = 0
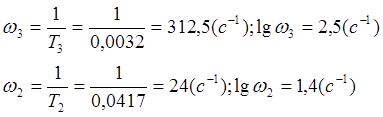
w2 = ![]() =
24 (с-1)
=
24 (с-1)
lgw2 = 1,4
w3 = ![]() =
312,5 (с-1)
=
312,5 (с-1)
lgw3 = 2,5
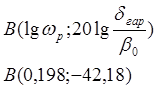
Положение рабочей точки.
А (lgwp; 20 lg![]() )
)
wp = ![]() =
3/1,9 = 1,578 (с-1) lgwp = 0,198
=
3/1,9 = 1,578 (с-1) lgwp = 0,198
b0 = ![]() =
1,92/3 = 1,2 (рад)
=
1,92/3 = 1,2 (рад)
20lg![]() = 42,18
(дБ)
= 42,18
(дБ)
20lgm = 47 (дБ)
lgm = 47/20 = 2,35 m = 102,35 = 223,8 (с-1)
m = КуКдКрКd Ку = ![]() = 505
= 505
Передаточная функция нескорректированного привода.
W(p) = ![]()
График.
20lg![]() = 20lg
= 20lg![]() = 10,88 (дБ)
= 10,88 (дБ)
20lg![]() = 20lg
= 20lg![]() = -4,68 (дБ)
= -4,68 (дБ)
Для упрощения корректирующего звена совмещаем ЖЛАЧХ с ЛАЧХ нескорректированного привода.
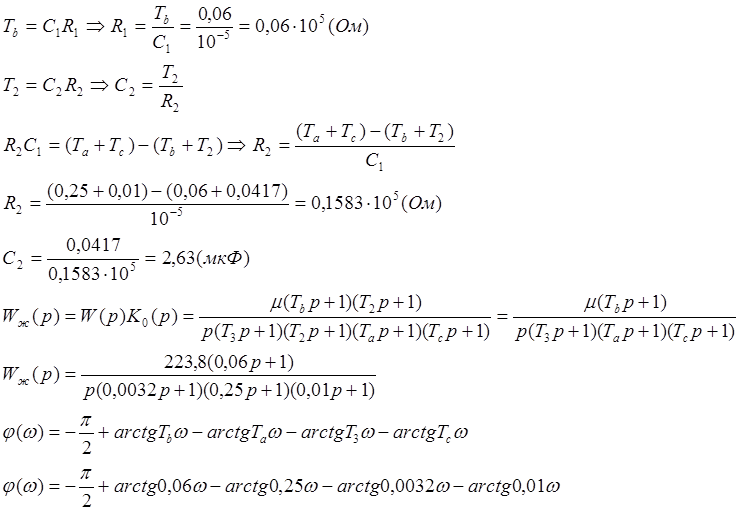
Wжел(р) = W(p)*К0(p)
W(p) – передаточная функция нескорректированного привода.
К0(р) – передаточная функция последовательного корректирующего звена.
20lgWжел(р) = 20lgК0(р) + 20lgW(р)
20lgК0(р) = 20lgWжел(р) - 20lgW(р)
Запишем передаточную функцию корректирующего звена.
К0(р) = ![]() =
= ![]()
Та = 1/wа = 1/3,98 = 0,25 с.
lgwа = 0,6 wа = 3,98 (c-1)
lgwb = 1,2 wb = 15,8 (c-1)
Тb = 1/wb = 1/15,8 = 0,06 с.
Т2 = 1/w2 = 0,0417 с.
lgwc = 2 wc = 100 (c-1)
Тc = 1/wc = 1/100 = 0,01 с.
Определяем параметры корректирующего звена. Один задаем произвольно.
Пусть С1=10мкФ
w |
0 |
10 |
100 |
173 (2,23) |
|||
|
j(w) |
-90 |
-134.77 |
-159.91 |
-183.04 |
Запас устойчивости по амплитуде m= 15 дБ
Запас устойчивости по фазе g= 153°
dгар=32мин=32/(60×57)=93,5×10-4(рад)
dск£dгар
Если i>10, то моментную погрешность не рассчитываем.
Строим полную структурную и функциональную схему следящего привода.
 |
|
 |
Функциональная схема привода с последовательной коррекцией.
5. Синтез корректирующей обратной связи.
Введем датчик скорости выходного вала с чувствительностью Кт.г.=0,1Вс/рад
Передаточная функция нескорректированного привода
Построим обратную ЛАЧХ нескорректированного привода.
Определим координаты рабочей точки
Строим обратную ЛАЧХ внутреннего контура.
![]()
Определим запасы устойчивости внутреннего контура по амплитуде и по фазе.
Внутренний контур будет устойчив, если в точке пересечения обратной ЛАЧХ нескорректированного привода и желаемой ЛАЧХ разность наклонов этих характеристик будет составлять ±20дБ/дек.
Запас устойчивости по фазе определяется в верхней части внутреннего контура(wc) g>30°
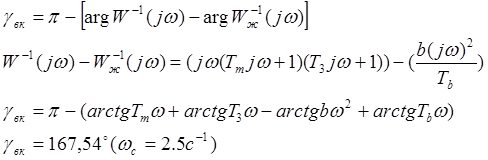
20lgb=-60 b=0,001
lgwb=1,35 Tb=0,045
wc=2,5
Для приводов с корректирующей обратной связью по скорости и ускорению передаточная функция имеет вид:
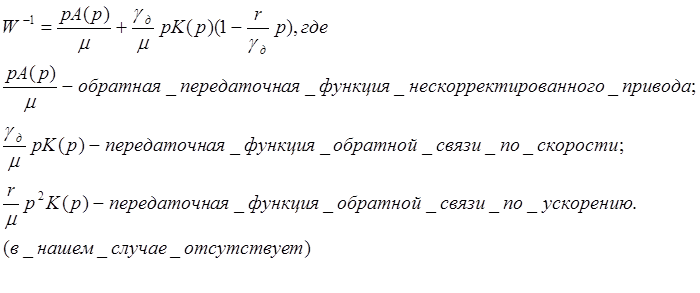
Тогда:
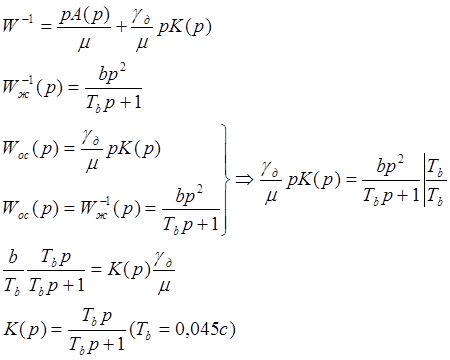 |
По виду передаточной функции определяем структуру корректирующего звена.
Определим параметры корректирующего звена.
С=10мкФ (задаем произвольно)
Тb=RСÞR= Тb /C=0,045*105(Ом)
Т.к. Кт.г.=0,1Вс/рад
не совпадает с истинным коэффициентом, то в структуру привода необходимо
включить резисторный делитель напряжения.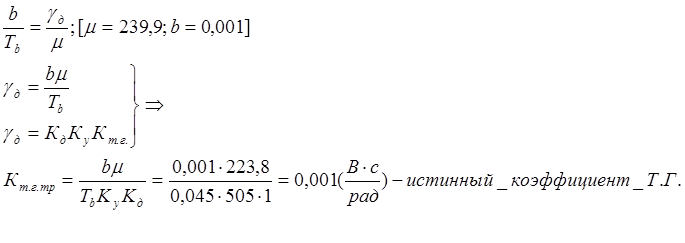
 |
Составим полную структурную схему привода с корректирующей обратной связью по скорости.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.