Если |u | > 0 и его можно измерить, то вычисление x(k+1) требуется производить, используя модификацию выражения (5), следующим образом:
![]() (k+1) = A
(k+1) = A![]() (k) + F(
(k) + F(![]() +u(k)) (10)
+u(k)) (10)

Уравнения (6) и (11) является формальным отражением основной идеи дискретного наблюдателя Калмана - прогнозирование координат состояния для (k+1) шага по данным оценок, полученным на k-м шаге с возможной коррекцией прогноза.
Алгоритм реализации дискретного фильтра Калмана для линейного стационарного объекта
Исходные данные:
A –матрица параметров дискретного объекта,
F - матрица параметров входа дискретного объекта,
C – матрица измерений
![]() V, W
–МО и дисперсии случайных сигналов соответственно на входе и в цепи измерения
выходного сигнала объекта,
V, W
–МО и дисперсии случайных сигналов соответственно на входе и в цепи измерения
выходного сигнала объекта,
k = 0 –начальное содержание счетчика циклов,
Nmax – максимальное число циклов
P(0)
=[0] - начальное значение ковариационной матрицы оценки ![]()
![]()
U(x) – входной сигнал
Шаг 1. Ввод исходных данных
Шаг 2. k=k+1
Шаг 3. Формирование предсказываемого значения вектора состояний:
![]()
Шаг 4. Получение невязки измерения:
![]()
Шаг 5. Вычисление ковариационной
матрицы оценки предсказаний ![]()
Q(k+1)=AP(k)AT+FVFT
Шаг 6. Определение коэффициента коррекции:
K(k+1)=Q(k+1)CT[CQ(k+1)CT+W]-1=Q(k+1) Cт/ (CQ(k+1)Cт +W)
Шаг 7. Формирование корректирующего сигнала:
![]()
Шаг 8. Формирование оценки вектора состояний
![]()
Шаг 9. Вычисление ковариационной матрицы оценки:
P(k+1)=Q(k+1)-K(k+1)CQ(k+1)=(E- K(k+1)C)Q(k+1)
Шаг 10. Если k<N max,
то P(k)=P(k+1), ![]() и переход к шагу
2, иначе - к шагу 11
и переход к шагу
2, иначе - к шагу 11
Шаг 11. Вывод результата
Шаг 12. Конец.
3. Экспериментальная часть
3.1. Переход от скалярной формы записи исходного уравнения к векторно-матричной форме
Уравнение объекта задано линейным дифференциальным уравнением второго порядка:
![]()
где а0, а1, а2, b – постоянные коэффициенты.
Исходные данные:

Схема набора для заданных исходных данных представлена на рис. 3.1.
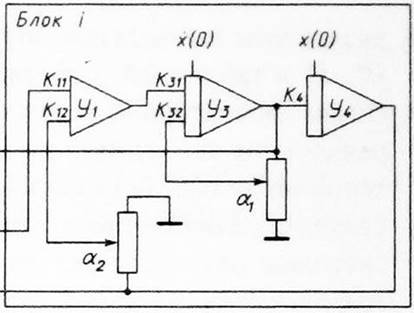
Рис. 3.1. Схема набора для заданных исходных данных.
где ![]()
![]()
![]()
3.2. Проверка адекватности модели и объекта
Схема лабораторной установки для исследования объекта представлена на рис. 3.2.1.
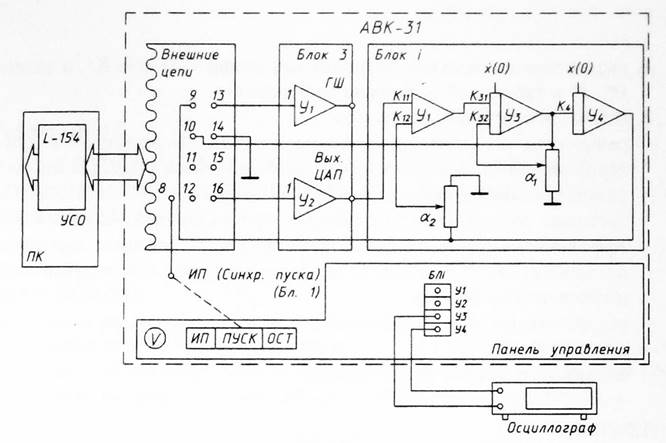
Рис. 3.2.1. Схема лабораторной установки.
Перед началом работы необходимо
убедиться в адекватности объекта и модели и определить параметры переходного
процесса для них (время переходного процесса tпп). Для этого
необходимо подать на модель и объект одинаковое управляющее воздействие,
одинаковые начальные условия и корректно задать матрицы ![]()
Возмущение UС = 1 В, x(0) = 0 В. Период дискретизации T0 = 0,1 с.
В результате получены следующие значения:
![]()

Случайный сигнал (белый шум) = 0.
Переходный процесс объекта и модели представлен на рис. 3.2.2.
Рис. 3.2.2. Переходный процесс объекта.
Из полученных результатов можно сделать вывод, что и модель, и объект являются адекватными.
Параметры переходного процесса для исследуемого объекта:
![]() .
.
Погрешность восстановления
выходной координаты ![]() . Относительная
погрешность
. Относительная
погрешность ![]() .
.
Погрешность восстановления
ненаблюдаемой координаты (производной) ![]() .
Относительная погрешность
.
Относительная погрешность ![]() .
.
Таким образом, при полном совпадении параметров модели и объекта наблюдатель полностью подстраивается под объект.
3.3. Исследование работы наблюдателя при несовпадении начальных условий объекта и модели
Управление по возмущению ![]()
Рис. 3.3.1. Переходный
процесс объекта и модели при ![]() .
.

Рис. 3.3.2. Переходный
процесс объекта и модели при ![]() .
.

Рис. 3.3.3. Переходный
процесс объекта и модели при ![]() .
.
Рис. 3.3.4. Переходный
процесс объекта и модели при ![]() .
.
Из полученных результатов можно сделать вывод, что при несовпадении начальных условий по координате и по скорости модели и объекта, восстановление как измеряемой, так и неизмеряемой координаты происходит только через 3-4 секунды, что соответствует трети времени переходного процесса. Т.е. восстановление происходит достаточно плохо.
Таблица 3.3.1. Результаты абсолютной и относительной погрешности восстановления координат состояния объекта при различных начальных условиях.
|
Параметры объекта и модели |
|
|
|
|
|
|
0,0224 |
2,24 |
0,0168 |
4,6 |
|
|
0,0242 |
0,96 |
0,0329 |
17,3 |
|
|
0,0141 |
2,82 |
0,0115 |
1,49 |
|
|
0,0161 |
1,41 |
0,0164 |
1,53 |
Из полученных результатов можно сделать вывод, что при несовпадении наблюдаемых координат восстановление происходит значительно хуже, чем при несовпадении ненаблюдаемых. Заметим, что относительная погрешность восстановления по скорости превышает допустимые пределы (10%).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.