u – управление, формируемое регулятором системы.
Коррекция прогнозируемого дискретной моделью объекта значений измеряемых координат состояния, производится в функции рассогласования(невязки - e(k+1) ) измеряемого и прогнозируемого значений,
e(k+1)=y(k+1)-![]() (k+1) (3)
(k+1) (3)
Невязка ![]() умножается на коэффициент К
коррекции предсказания.
умножается на коэффициент К
коррекции предсказания.
В результате формируется вектор
![]()
![]() (4)
(4)
Для
формирования новой оценки ![]() (k+1) в алгоритме работы фильтра Калмана предварительно
реализуется задача вычисления на каждом шаге корректирующего коэффициента
(k+1) в алгоритме работы фильтра Калмана предварительно
реализуется задача вычисления на каждом шаге корректирующего коэффициента ![]() .
.
Оптимальные значения корректирующего коэффициента на (k+1) шаге можно определить по формуле:
K(k+1)=Q(k+1)CT[CQ(k+1)CT+W]-1
где:
![]() - матрица дисперсии предсказания;
- матрица дисперсии предсказания;
![]() - матрица дисперсии помехи
измерения;
- матрица дисперсии помехи
измерения;
![]() – матрица (вектор – строка)
измерений.
– матрица (вектор – строка)
измерений.
Вектор ![]() используется для коррекции вектора
оценки прогнозируемых координат состояния в виде:
используется для коррекции вектора
оценки прогнозируемых координат состояния в виде:
 (5)
(5)
Обратная связь (управление) формируется как линейная функция оценочных значений полного вектора координат состояния, получаемого с выхода наблюдателя, т.е.
U(k)=u(k) = -K* ![]() (k)
, (6)
(k)
, (6)
где:
![]() - матрица (вектор-строка)
оптимальных коэффициентов обратной связи, определяемых, например, методом
динамического программирования.
- матрица (вектор-строка)
оптимальных коэффициентов обратной связи, определяемых, например, методом
динамического программирования.
Как было
отмечено ранее, уравнение (6), задаваемое регулятором, является линейной
функцией полного вектора оценочных значений ![]() (k), формируемых наблюдателем, а не объектом.
(k), формируемых наблюдателем, а не объектом.
3. Экспериментальная часть
3.1. Переход от скалярной формы записи исходного уравнения к векторно-матричной форме
Уравнение объекта задано линейным дифференциальным уравнением второго порядка:
![]()
где а0, а1, а2, b – постоянные коэффициенты.
Исходные данные:


Схема набора для заданных исходных данных представлена на рис. 3.1.

Рис. 3.1. Схема набора для заданных исходных данных.
где ![]()
![]()
![]()
3.2. Проверка адекватности наблюдателя и объекта
Схема лабораторной установки для исследования объекта представлена на рис. 3.2.1.
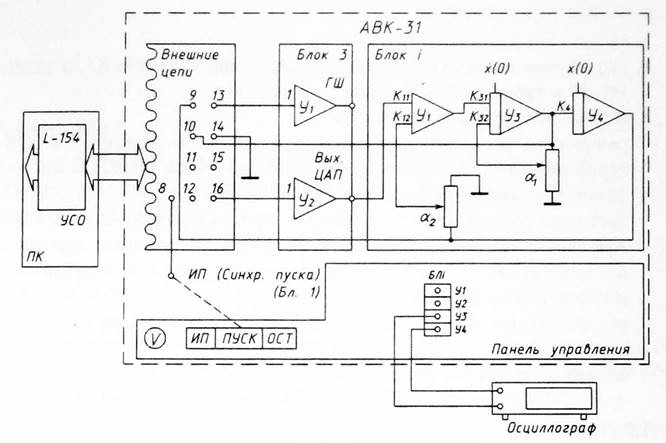
Рис. 3.2.1. Схема лабораторной установки.
Перед началом работы необходимо
убедиться в адекватности объекта и модели без подключения ЛК-управления и
определить параметры переходного процесса для них (время переходного процесса tпп).
Для этого необходимо подать на наблюдатель и объект одинаковое управляющее
воздействие, одинаковые начальные условия и корректно задать матрицы ![]()
Возмущение UС = 0 В, x(0) = 2 В. Период дискретизации T0 = 0,1 с.
В результате получены следующие значения:
![]()
Оптимальные коэффициенты:
![]()
Переходный процесс объекта и наблюдателя представлен на рис. 3.2.2.

Рис. 3.2.2. Переходный процесс объекта.
Из полученных результатов можно сделать вывод, что и наблюдатель, и объект являются адекватными.
Параметры переходного процесса для исследуемого объекта:
![]() .
.
Погрешность восстановления
выходной координаты ![]() . Относительная
погрешность
. Относительная
погрешность ![]() .
.
Погрешность восстановления
ненаблюдаемой координаты (производной) ![]() .
Относительная погрешность
.
Относительная погрешность ![]() .
.
Таким образом, при полном совпадении параметров наблюдателя и объекта, наблюдатель полностью соответствует объекту.
В данном случае оптимальное ЛК-управление отключено, объект находится в разомкнутом состоянии.
3.3. Исследование системы ЛК – управления с полностью управляемыми координатами состояния объекта
В данном пункте рассматривается система без использования наблюдателя (модели объекта), т.к. все координаты состояния объекта измеряемы и в модели нет необходимости.
Оптимальные коэффициенты обратной
связи: ![]()
Рис. 3.3.1. Переходный
процесс замкнутой системы при ![]() .
.
Критерии оптимальности: ![]()
Время переходного процесса:
![]()
Из полученных результатов можно сделать вывод, что при полностью наблюдаемом векторе состояния объекта происходит получение оптимальных характеристик переходного процесса.
3.4. Исследование системы ЛК – управления с не полностью управляемыми координатами состояния объекта
Оптимальные коэффициенты обратной
связи: ![]()

Рис. 3.4.1. Переходный
процесс замкнутой системы при ![]()

Рис. 3.4.2. Переходный
процесс объекта и наблюдателя при ![]() .
.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.