



Санкт-Петербургский Государственный Политехнический Университет
Факультет Технической Кибернетики
Кафедра Компьютерных Систем и Программных Технологий
Отчет
по лабораторной работе №5-3
Исследование влияния параметров регулятора на качество переходных процессов
Исследование компьютерных систем управления
Работу выполнили: группа 5081/10
Группа 5081/1
Преподаватель:
Подпись преподавателя:___________________
Санкт-Петербург
2011
Цель работы: исследование влияния параметров систем цифрового управления на качество процессов управления
Теоретические сведения
Уравнение
ПИД-регулятора в непрерывной форме:  , где
, где
![]() - рассогласование управляемой
координаты и уставки (ошибка управления).
- рассогласование управляемой
координаты и уставки (ошибка управления).
В работе проводится моделирование
объекта, заданного линейным дифференциальным уравнением второго порядка вида: ![]()
![]()
Показатели качества и их оценка:
·
перерегулирование: ![]()
·
колебательность: ![]()
Экспериментальная часть
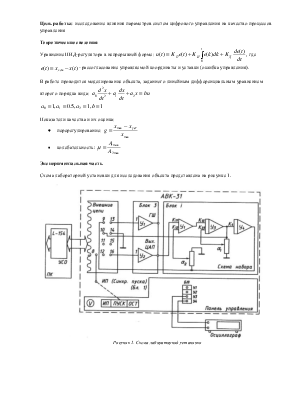
Схема лабораторной установки для исследования объекта представлена на рисунке 1.
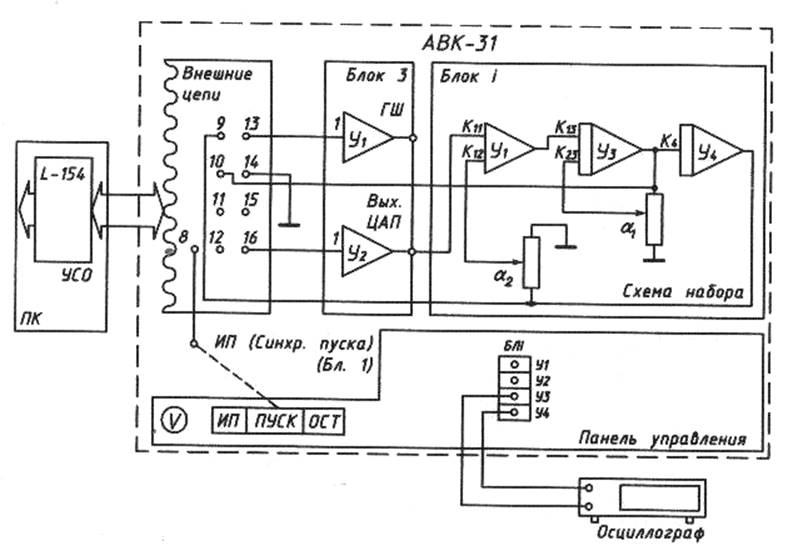
Рисунок 1. Схема лабораторной установки
Схема набора для заданных исходных данных представлена на рисунке 2.
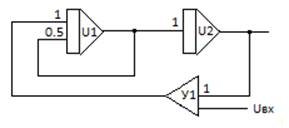
Рисунок 2. Схема набора для заданных исходных данных
Передаточная функция объекта управления:
![]()
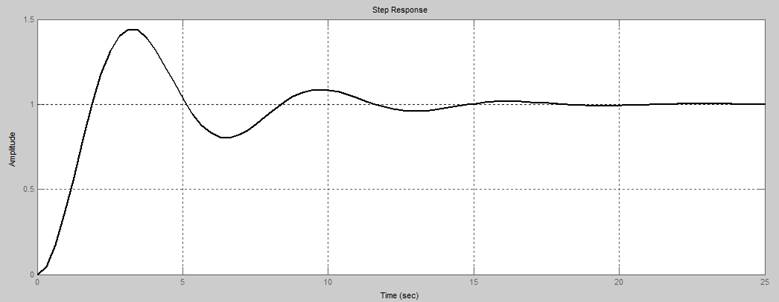
Рисунок 3. Переходный процесс объекта
Время переходного процесса: ![]()
Коэффициент передачи К = 1;
Постоянная
времени T = 1 сек, выберем дискретность: ![]()
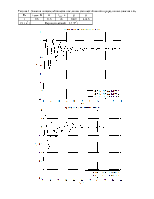
Структурная схема исследуемой системы представлена на рисунке 4.
Рисунок 4. Структурная схема исследуемой системы
Передаточная
функция замкнутой системы: ![]()
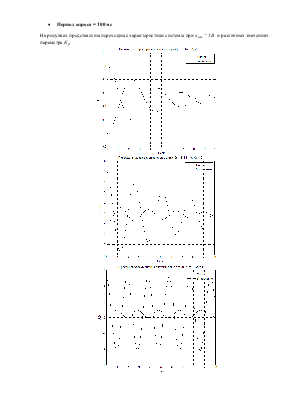
· Период опроса = 100 мс
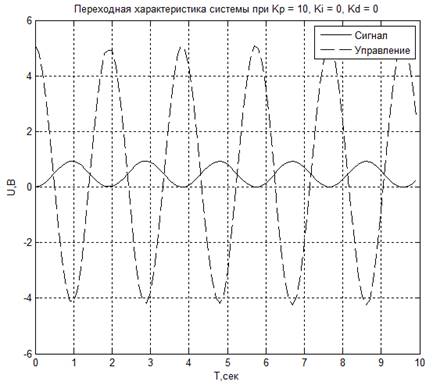
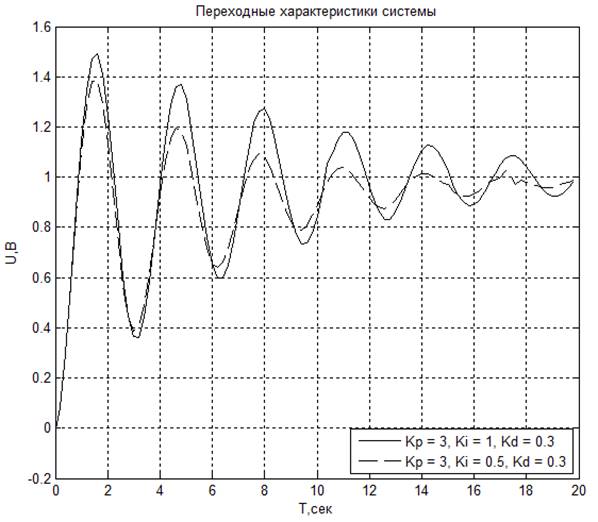
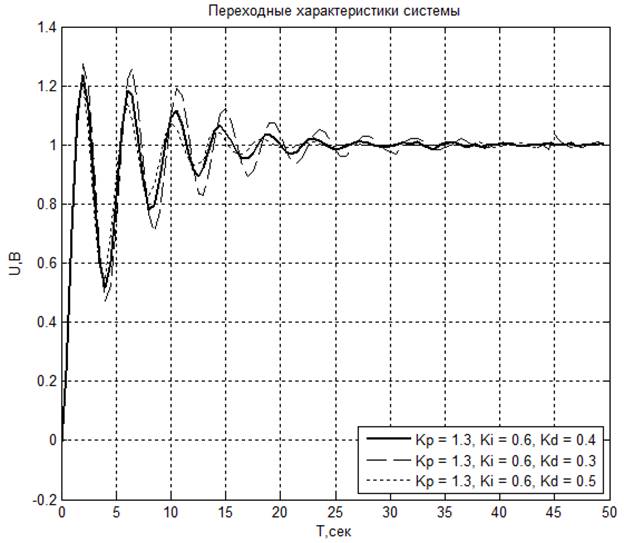
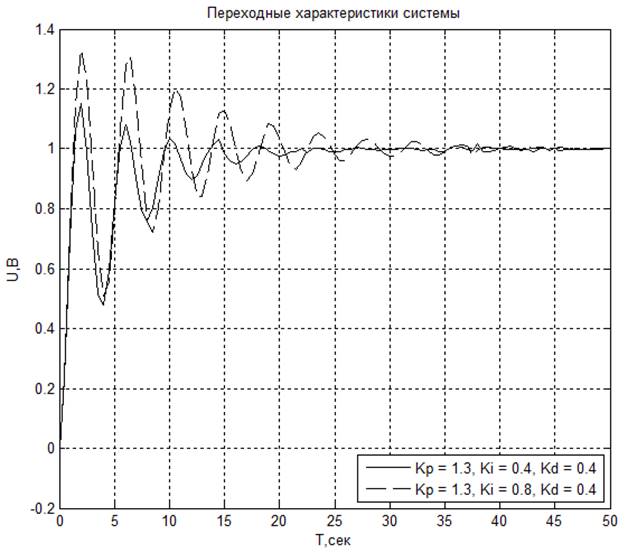
На рисунках представлены переходные характеристики системы при хуст = 1В и различных значениях параметра Кp.
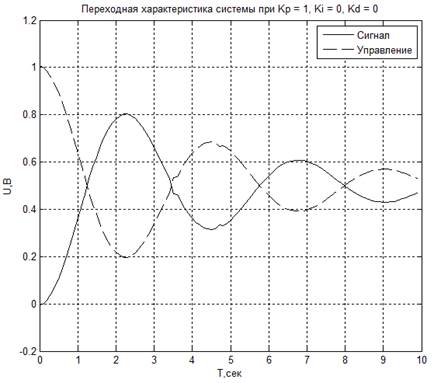
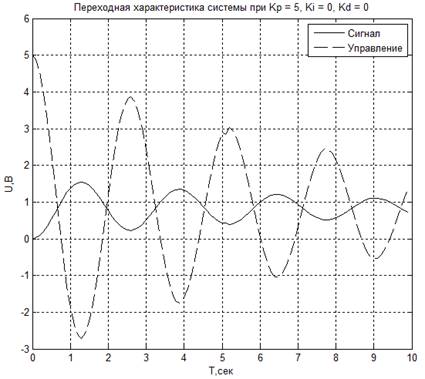
![]()
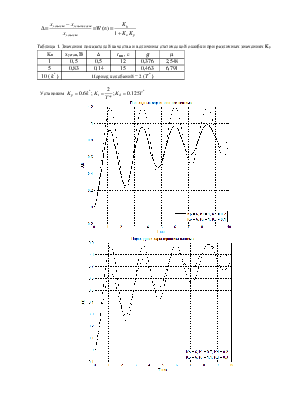
Таблица 1. Значения показателей качества и величины статической ошибки при различных значениях Kp
|
Kп |
xустан, В |
|
|
|
|
|
1 |
0,5 |
0,5 |
12 |
0,376 |
2,548 |
|
5 |
0,83 |
0,14 |
15 |
0,463 |
6,791 |
|
10 ( |
Период
колебаний = 2
( |
||||
Установим
![]()
· Период опроса = 200 мс
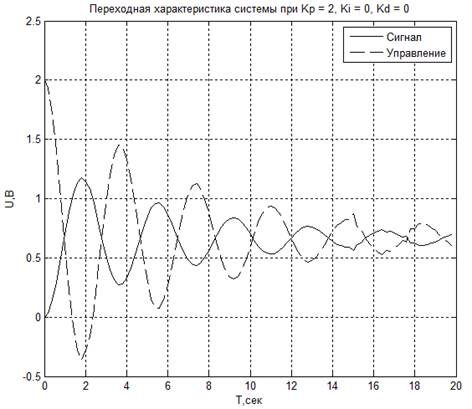
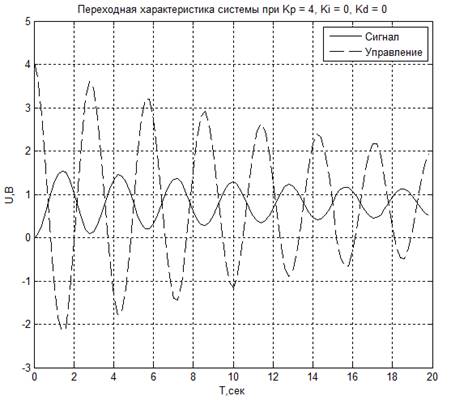
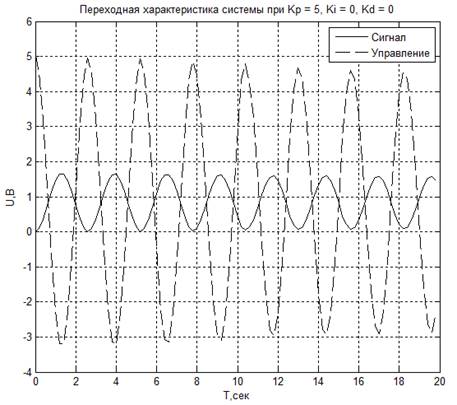
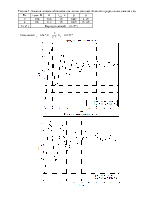
Таблица 2. Значения показателей качества и величины статической ошибки при различных значениях Kp
|
Kп |
xустан, В |
|
|
|
|
|
2 |
0,65 |
0,35 |
22 |
0,447 |
4,29 |
|
4 |
0,8 |
0,2 |
25 |
0,479 |
15,375 |
|
5 ( |
Период
колебаний = 2,6
( |
||||
Установим
![]()
· Период опроса = 500 мс
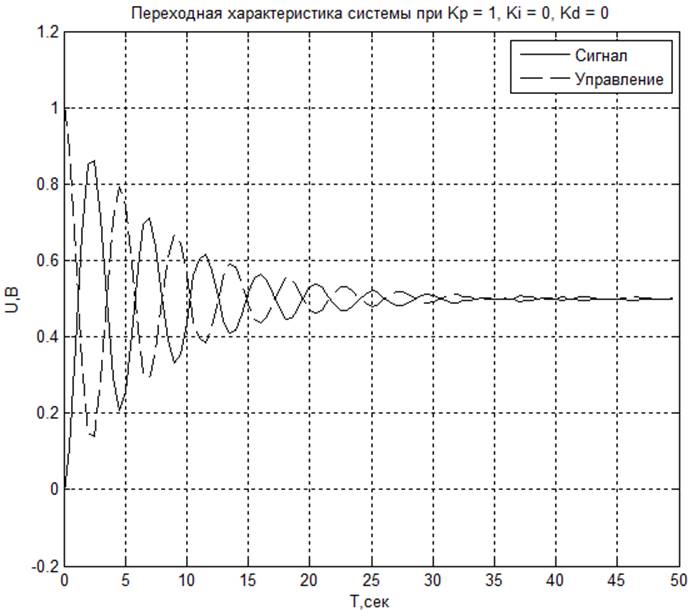
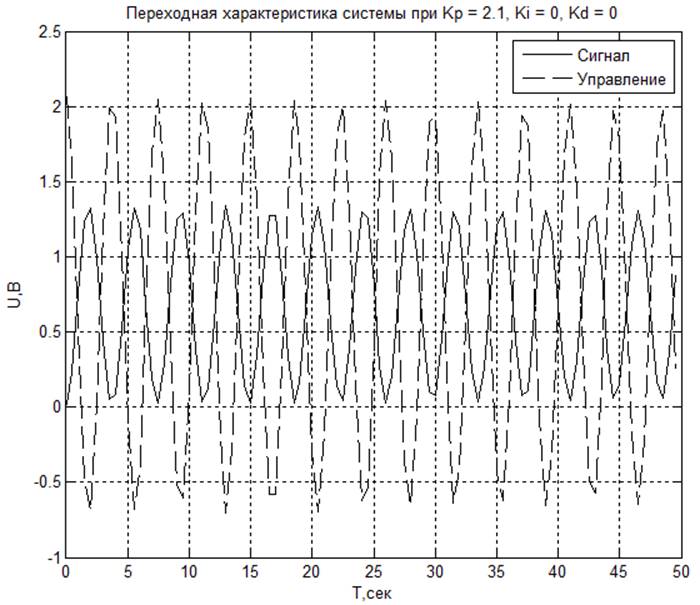
Таблица 3. Значения показателей качества и величины статической ошибки при различных значениях Kp
|
Kп |
xустан, В |
|
|
|
|
|
1 |
0,5 |
0,5 |
35 |
0,419 |
4,145 |
|
2,1 ( |
Период
колебаний = 3,5
( |
||||
Выводы:
В данной работе проводилось исследование влияния параметров ПИД-регулятора на качество переходных процессов в системе.
Влияние пропорциональной составляющей: при использовании только пропорционального регулятора значение регулируемой величины никогда не устанавливается на заданном значении, всегда существует статическая ошибка. По мере увеличения коэффициента пропорциональности статическая ошибка уменьшается, однако слишком большое значение коэффициента становится причиной автоколебаний, а при дальнейшем увеличении система становится неустойчивой. Также при увеличении Кp увеличивается время переходного процесса, колебательность и перерегулирование.
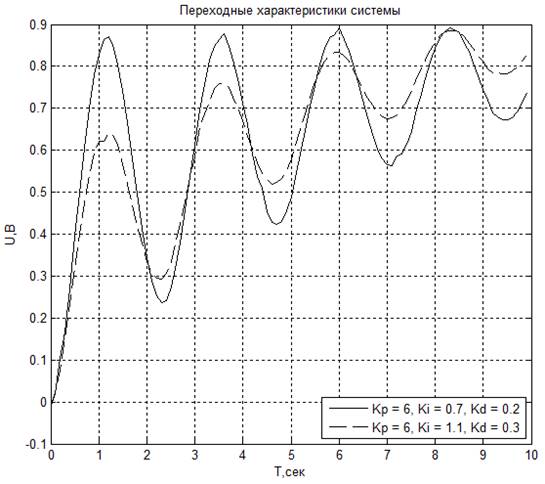
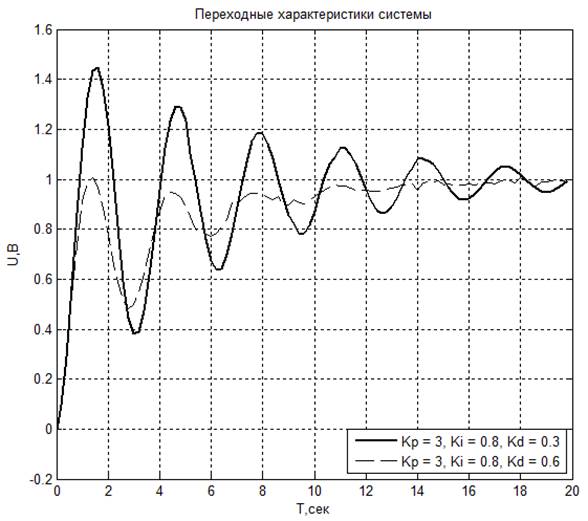
Влияние интегральной составляющей: Для устранения статической ошибки вводится интегральная составляющая, при этом через некоторое время регулируемая величина стабилизируется на заданном значении. Таким образом, при введении И-составляющей статическая ошибка исчезает, однако параметры переходного процесса увеличиваются.
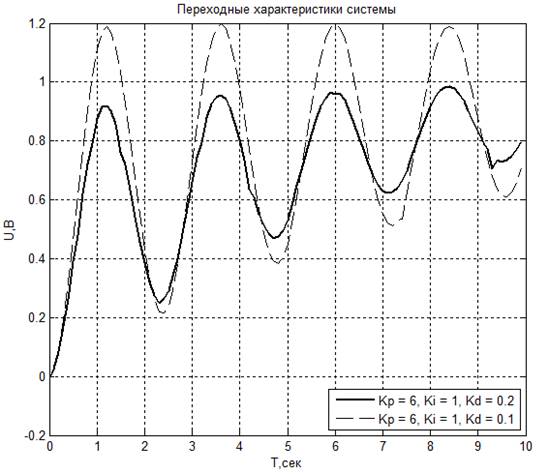
Влияние дифференциальной составляющей: Дифференциальная составляющая оценивает скорость изменения ошибки и противодействует отклонениям регулируемой величины. Увеличение Д-составляющей приводит к уменьшению времени переходного процесса, перерегулирования и колебательности.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.