









Санкт-Петербургский государственный политехнический университет
Факультет технической кибернетики
Кафедра автоматики и вычислительной техники
по лабораторной работе № 5-3
Исследование системы компьютерного управления с ПИД-регулятором
Выполнил студент гр. 5081/1
Проверил:
Санкт-Петербург
2009
1. Цель работы
1). ознакомление с практическими методами настройки промышленных систем управления;
2). исследование влияния параметров систем цифрового управления на качество процессов управления.
2. Теоретические сведения
Уравнение ПИД-регулятора в непрерывной форме:
 , где
, где ![]() -
рассогласование управляемой координаты и уставки (ошибка управления).
-
рассогласование управляемой координаты и уставки (ошибка управления).
В дискретной форме уравнение можно записать в виде:
![]()
В рекуррентной форме ПИД-закон имеет вид:
![]() , где
, где ![]()
![]()
Т0 – период квантования.
Начальное значение рекуррентной формы:
![]()
Изменяя коэффициенты КП, Кид, Кдд, можно получить рекуррентную форму для П-, И-, Д-, ПИД- законов управления.
В данной работе проводится моделирование объекта, заданного линейным дифференциальным уравнением второго порядка вида:
![]()
где а0, а1, а2, b – постоянные коэффициенты.
Исходные данные:
Оценка показателей качества производится по формулам:
![]() - перерегулирование
- перерегулирование
![]() -
колебательность
-
колебательность
Схема набора для заданных исходных данных представлена на рис. 2.1.
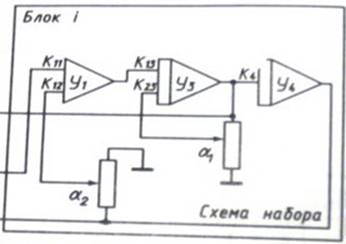
Рис. 2.1. Схема набора для заданных исходных данных.
где ![]()
![]()
![]()
3. Экспериментальная часть
3.1. Проверка адекватности объекта
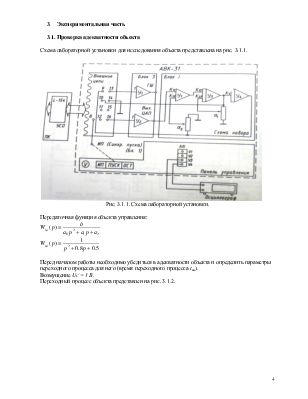
Схема лабораторной установки для исследования объекта представлена на рис. 3.1.1.
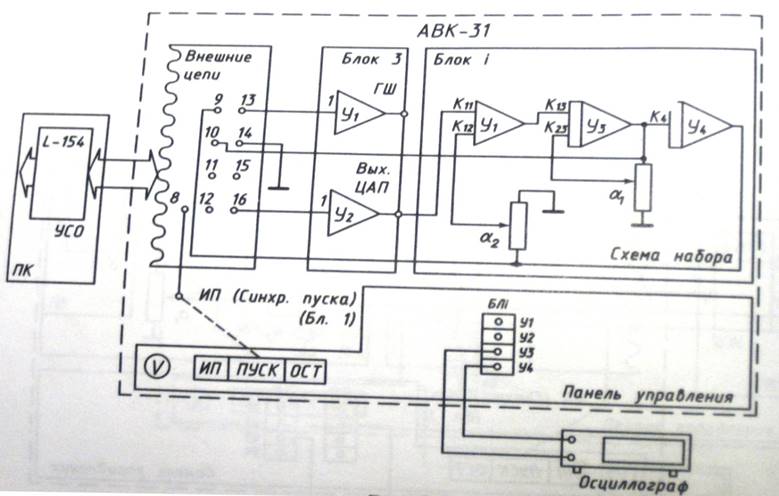
Рис. 3.1.1. Схема лабораторной установки.
Передаточная функция объекта управления:
![]()
![]()
Перед началом работы необходимо убедиться в адекватности объекта и определить параметры переходного процесса для него (время переходного процесса tпп).
Возмущение UС = 1 В.
Переходный процесс объекта представлен на рис. 3.1.2.
Рис. 3.1.2. Переходный процесс объекта.
Параметры переходного процесса для исследуемого объекта:
![]() сек
сек
3.2. Исследование влияния пропорциональной составляющей на переходную характеристику системы
Передаточная функция регулятора:
![]()
Передаточная функция объекта управления:
![]()
Структурная схема исследуемой системы представлена на рис. 3.2.1.
Рис. 3.2.1. Структурная схема исследуемой системы.
Передаточная функция замкнутой системы:
 , Ко = 1
, Ко = 1 
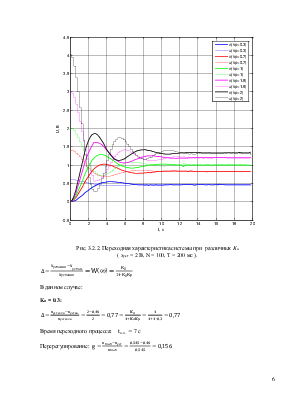
Переходная характеристика системы при хуст=2В и различных значениях параметра Кп представлена на рис. 3.2.2.
Рис. 3.2.2. Переходная характеристика системы при различных Kп
( xуст = 2 В, N = 100, T = 200 мс ).
![]()
В данном случае:
Kп = 0.3:
![]()
Время переходного процесса: ![]() 7
с
7
с
Перерегулирование: ![]()
Kп = 0.7:
![]()
![]() 8,5
с
8,5
с
![]()
![]()
Kп = 1:
![]()
![]() 9,5
с
9,5
с
![]()
![]()
Kп = 1.5:
![]()
![]() 10,5
с
10,5
с
![]()
![]()
Kп = 2:
![]()
![]() 11,5
с
11,5
с
![]()
![]()
Таблица 3.2.1. Значения показателей качества и величины статической ошибки при различных значениях Kп.
|
Kп |
xустан, В |
|
|
|
|
|
0,3 |
0,46 |
0,77 |
7 |
0,156 |
- |
|
0,7 |
0,825 |
0,588 |
8,5 |
0,1951 |
1,235 |
|
1 |
1 |
0,5 |
9,5 |
0,2233 |
1,226 |
|
1,5 |
1,2025 |
0,4 |
10,5 |
0,2589 |
1,301 |
|
2 |
1,3525 |
0,33 |
11,5 |
0,2728 |
1,326 |
Из полученных результатов можно сделать вывод, что при увеличении Кп величина статической ошибки уменьшается, однако при этом увеличивается колебательность системы и время переходного процесса.
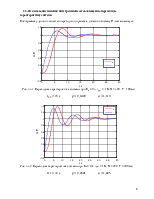
3.3. Исследование влияния интегральной составляющей на переходную характеристику системы
Постараемся улучшить качество переходного процесса, добавив в систему И-составляющую.
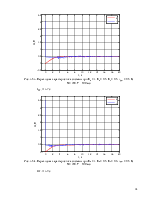
Рис. 3.3.1. Переходная характеристика системы при Ки = 0.3, xуст = 1 В, N = 300 , T = 100 мс.
![]() 20
с
20
с ![]()
![]()
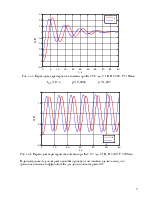
Рис. 3.3.2. Переходная характеристика системы при Ки = 0.4, xуст = 1 В, N = 200 , T = 200 мс.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.