Лабораторная работа № 12
ИССЛЕДОВАНИЕ ХАРАКТЕРИСТИК ТИПОВЫХ ЗВЕНЬЕВ
СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
Цель работы. Ознакомиться с экспериментальными способами определения частотных и переходных характеристик типовых звеньев систем автоматического регулирования.
1. КРАТКИЕ СВЕДЕНИЯ ИЗ ТЕОРИИ
Линейное динамическое звено - это любой элемент системы автоматического регулирования (CAP), связь между выходной Y и входной X величинами которого определяется линейным дифференциальным уравнением
any(n) + an-1y(n-1) + … + a1y1 + a0y = bmx(m) + bmx(m-1) + … +
+ b1x1+ b0x (1)
где n - порядок уравнения (n =>m). Типовыми называют динамические звенья, работа которых описывается дифференциальным уравнением не выше второго порядка.
По дифференциальному уравнению звена можно определить его передаточную функцию
bmpm + bm-1pm-1 + … + b1p + b0 Y(p)
![]()
![]() K(p)
=
= (2)
K(p)
=
= (2)
anpn + an-1pn-1 + … + a1p + a0 X(p)
и комплексный коэффициент усиления (ККУ)
bm(jw)m + bm-1(jw)m-1 + … + b1(jw) + b0 Y’
![]()
![]() K(jw)
=
= (3)
K(jw)
=
= (3)
an(jw)n + an-1(jw)n-1 + … + a1(jw) + a0 X’
где Х(р), Y(p) - изображение по Лапласу входной и выходной величины; Х’ = Х(m), Y’ =Yme jф - комплексные амплитуды гармонических колебаний на выходе и входе звена.
ККУ имеет определенный физический смысл. Если на вход линейного звена подать синусоидальное колебание с амплитудой Хm, и частотой w
х(t)=Xmsin(wt), (4) то в установившемся режиме на выходе звена будут синусоидальные колебания с той же частотой w, но с амплитудой Ym и сдвигом по фазе ф
y(t) = Ymsin(wt+ф), (5)
При этом модуль ККУ
Ym
![]() Mod K(jw) = K(w) = (6)
Mod K(jw) = K(w) = (6)
Xm
показывает, во сколько раз изменилась амплитуда колебаний, а аргумент ККУ
arg K(jw) = ф(w) = ф (7)
показывает сдвиг фазы колебаний на выходе по отношению к колебаниям на входе звена.
Для описания динамических свойств звеньев CAP применяются два вида характеристик - частотные и переходные.
Частотные характеристики представляют в различных, видах зависимости KKУ от частоты w. Наиболее широко используется амплитудная частотная характеристика К(w)- зависимость модуля ККУ от частоты и фазовая частотная характеристика ф(w) - зависимость аргумента ККУ от частоты.
Для инженерных расчетов более удобно амплитудную и фазовую частотные характеристики изображать в логарифмическом масштабе.
При построении логарифмической амплитудной частотной характеристики (ЛАХ) по оси ординат откладывают величину
L(w) = 20 lg K(w), (8)
единицей измерения для которой является децибелл (дБ). По
![]()
![]() 1
1
![]() оси абсцисс откладывается круговая частота w в
оси абсцисс откладывается круговая частота w в
c
логарифмическом масштабе, т.е. фактически откладывается величина lg w, но указывается значение самой частоты w (рис. 1, а).
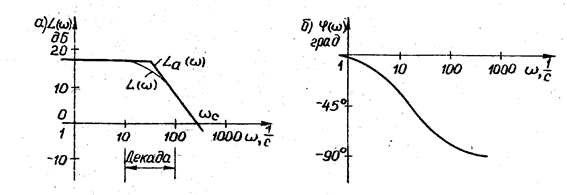
Рис. 1. Логарифмические частотные характеристики
Равномерной единицей на оси абсцисс является декада — любой отрезок, на котором значение частоты увеличивается в 10 раз. Точка пересечения ЛАХ с осью абсцисс называется частотой среза wc . Начало координат обычно помещают в точке w = 1, так как lg 1 = О. Точка же w = О лежит в -оо. Однако в зависимости от интересующего диапазона частот можно начало координат брать и в другой точке (w = 0,1; w = 10 или др.).
Преимущество ЛАХ перед обычными амплитудными частотными характеристиками заключается в том, что в большинстве практических случаев они могут быть представлены в виде ломаных линий - асимптотических ЛАХ La(w). В связи с этим упрощаются расчеты и графические построения частотных характеристик.
При построении логарифмической фазовой частотной характеристики (ЛФХ) отсчет углов ф идет по оси ординат в обычном масштабе в угловых градусах. По оси абсцисс откладывается по-прежнему частота w в логарифмическом масштабе (рис.1,б).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.




