Преобразованная структурная схема якорного канала управления.
Общая передаточная функция контура скорости с подчинённым ему внутренним контуром регулирования тока якоря была рассчитана ранее и имеет вид:

При р = 0 получим:
Тогда:
 ,
,
При UЗАД = 8 В получаем ω = 104,7 рад/с
Построим статическую характеристику по управлению якорного канала:
Рис.9 Статическая характеристика
Рассмотрим теперь зависимости  и
и  .
.
Замкнутая система управления по каналу Мст – ω
При р = 0 получим преобразованную структурную схему (рис.10).
 Рис.10. Преобразованная структурная схема якорного
канала управления
Рис.10. Преобразованная структурная схема якорного
канала управления
Замкнутая система управления по каналу Uс – ω
При р = 0 получим преобразованную структурную схему (рис.11).
 Рис.11. Преобразованная структурная схема якорного
канала управления
Рис.11. Преобразованная структурная схема якорного
канала управления
При проведении преобразований числитель передаточных функций получится с дифференцирующим звеном, поэтому при р = 0 получаем ФМст(р)=0 и ФUc(р) = 0. Следовательно, отсутствует статическая ошибка по возмущению Uc и Мст, что соответствует оптимизации на СО.
5. Динамический расчет канала якоря
Расчёт динамики САУ заключается в определении показателей качества САУ во время переходного процесса: перерегулирование ׁσ%, показатель колебательности М, время регулирования (длительность переходного процесса) tрег, и сравнение их с заданными или типовыми.
Расчёт переходных процессов в оптимизированной САУ по управлению и по возмущению будет производиться на ЭВМ при использовании программы SMED. Необходимо структурную схему (рис.7) преобразовать в схему, удобную для работы с программой SMED (рис.12).
На схеме обозначено:
К1 = Ксу1 = 0,3125;
Т1 = 4∙Тμ∑2 = 4 · 0,02168 = 0,08672 с;

Т2 = 4·Тμ∑1 = 4 · 0,00794 = 0,03176 с;
Т3 = Ттп = 3,6·10-3 с;

К4 = Ктп = 26;
Т4 = Тя∑ = 0,00254 с;
К5 = Кя∑ = 1,62 См;
Т5 = Тдтя = 1,8·10-3 с;
К6 = Км·ФвN = 0,398;
К7 = Кдтя = 0,167;
К8 = 1/J∑ = 1/0,26 = 3,846;
К9 = Ке·ФвN = 0,398;
К10 = Ктг·Кф = 0,024;
Т6 = Т7 = Ттг = Тф = 2,9·10-3 с.
Анализ качества настройки регулятора
После расчёта переходных процессов можно оценить правильность синтеза структуры регуляторов и расчёта их параметров, т.е. оценить качество настройки регуляторов. Симметричный оптимум (СО) устраняет статические ошибки по управлению и по возмущению, перерегулирование (σ% = 43.4%), время регулирования tрег ≤ 16,5 · (2·Тμ.).
Эти показатели можно взять за контрольные и путём сравнения их с полученными по переходным процессам, сделать вывод о качестве настройки регуляторов.
На рисунках 13-18 представлены рассчитанные переходные процессы в канале регулирования электродвигателя со стороны якоря. Малые постоянные времени контура тока и контура скорости: Тμ∑1 = 0,00794 с, Тμ∑2 = 0,02168 с.
Так как регулятор тока настроен на СО, то:
tрег1 = 16,5 · 2 · Тμ∑1 = 16,5 · 2 · 0,00794 = 0,262 с
Контур скорости также настроен на СО:
tрег2 = 16,5 · 2 · Тμ∑2 = 16,5 · 2 · 0,02168 = 0,715 с
Сначала рассмотрим контур регулирования тока:
1) Скачок напряжения задания:
Uзад,т
= 3 В,  . Получаем ∆Uзад.т = 0,05 · 3 = 0,15 В
. Получаем ∆Uзад.т = 0,05 · 3 = 0,15 В
График переходной характеристики представлен на рис.13.
Как видно из переходного процесса:
Быстродействие tрегТ = 0,18 c < tрег1 = 0,262 c – лучше планируемого
Перерегулирование  – немного
превышает
– немного
превышает
Видно, что скачок Uзад влечёт за собой и увеличение тока якоря.
2) Скачок сетевого напряжения:
UяN = 52 В,  . Получаем ∆UС = 0,07 · 52 = 3,64 В
. Получаем ∆UС = 0,07 · 52 = 3,64 В
График переходной характеристики представлен на рис.14.
3) Скачок момента нагрузки:
МN = 7,16 H·м,  .
Получаем ∆МСТ = 0,06 · 7,16 = 0,4296 Н·м
.
Получаем ∆МСТ = 0,06 · 7,16 = 0,4296 Н·м
График переходной характеристики представлен на рис.15.
Далее рассмотрим контур регулирования скорости с подчинённым ему контуром тока:
1) Скачок напряжения задания:
Uзад,С
= 8 В,  . Получаем ∆Uзад.с = 0,05 · 8 = 0,4 В
. Получаем ∆Uзад.с = 0,05 · 8 = 0,4 В
Графики переходных характеристик представлены на рис.16.
Быстродействие tрегС = 0,55c < tрег2 = 0,715 c – лучше планируемого
Перерегулирование  – регулятор скорости
настроен качественно.
– регулятор скорости
настроен качественно.
Видно, что скачок Uзад воздействует на частоту вращения, при этом ток не должен измениться.
2) Скачок сетевого напряжения:
UяN = 52 В,  . Получаем ∆UС = 0,07 · 52 = 3,64 В
. Получаем ∆UС = 0,07 · 52 = 3,64 В
Графики переходных характеристик представлены на рис.17.
3) Скачок момента нагрузки:
МN = 7,16 H·м,  .
Получаем ∆МСТ = 0,06 · 7,16 = 0,4296 Н·м
.
Получаем ∆МСТ = 0,06 · 7,16 = 0,4296 Н·м
Графики переходных характеристик представлены на рис.18.
Перерегулирование контура тока больше, чем планируемое, а контура скорости – меньше. Можно сделать вывод о хорошей настройке регулятора скорости и не очень хорошей настройке регулятора тока. Т.к. основной регулируемой величиной является скорость, то полученный результат – удовлетворительный.
6. Синтез электрических схем регуляторов
Регулятор тока якоря имеет следующую передаточную функцию:
Данную передаточную функцию можно представить в виде:
где
Т1 = 4·Тμ∑1 = 4 · 0,00794 = 0,03176 с,
Т2 = 1 с;
К1 = Кpт = 8,95.
Для реализации регулятора тока ставим пропорционально-интегральный регулятор (ПИ-регулятор) и интегральный регулятор (И-регулятор).
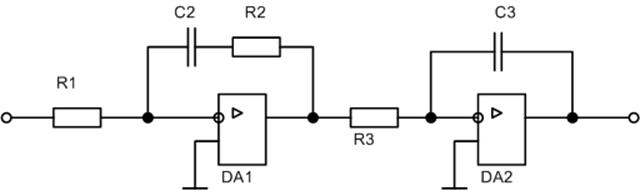
Рис.19. Электрическая схема регулятора тока якоря
K1 = R2 / R1 T1 = R2 · C2 Т2= R3 · C3
Примем R2 = 100 кОм, тогда R1 = R2 /К1 = 105 /8,95= 11,173 кОм
Из стандартного ряда выбираем R1 = 12 кОм; С2 = 0,4 мкФ.
Принимаем R3 = 100 кОм, тогда 
Из стандартного ряда выбираем С3 = 10 мкФ.
Регулятор скорости имеет следующую передаточную функцию:
Данную передаточную функцию можно представить в виде:
где Т3 = 4 · Тμ∑2 = 4 · 0,02168 = 0,08672 с;
К2 = Кpс = 126
Данный регулятор можно выполнить на пропорционально-интегральном регуляторе (ПИ-регуляторе):
Рис.20. Электрическая схема регулятора скорости
Т3 = R4 · C4 К2 = R4 / R5
Принимаем R4 = 100 кОм, тогда
Из стандартного ряда выбираем С4 = 1 мкФ.
Выбираем R5 = 1 кОм.
7. Принципиальная электрическая схема якорного канала и описание
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.