ПОЗИЦИОННЫЕ РЕГУЛЯТОРЫ
Позиционные регуляторы реализуют пропорциональный закон регулирования при kn—»-oo. В отличие от аналоговых регуляторов позиционные регуляторы формируют выходной сигнал Up, имеющий определенное число постоянных значений, например, два или три, соответствующие двух- или трехпозиционным регуляторам.
В двухпозиционных регуляторах при переходе выходной величины Yчерез заданное значение Узад изменяется регулирующее воздействие Up, которое переводит регулирующий орган из одного крайнего положения в другое: «открыт» - «закрыт», «включен» - «выключен». Работа идеального двухпозиционного регулятора может быть записана в следующем виде:
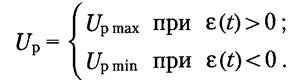 (3.3.2)
(3.3.2)
В графической форме работа двухпозиционного регулятора соответствует характеристике идеального реле (рис. 3.2.1).
В трехпозиционном регуляторе, кроме крайних значений регулирующего значения Up, есть среднее значение Up0, которое характеризует состояние - «норма».
Характеристика трехпозиционного регулятора описывается выражением:
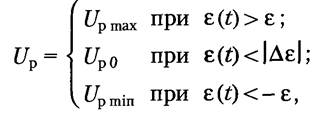 (3.3.3)
(3.3.3)
где Де - зона нечувствительности (параметр настройки позиционных регуляторов).
Схематический и графические алгоритмы трехпозиционного регулятора показаны на рис. 3.3.2.
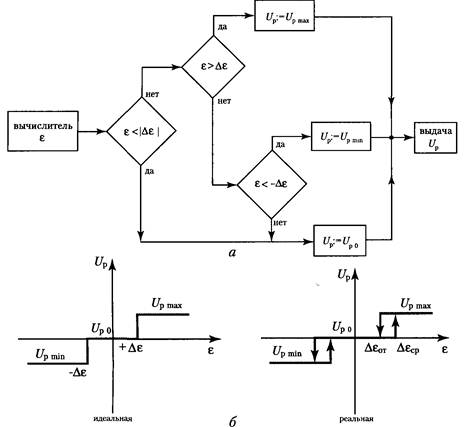
Рис. 3.3.2. Алгоритм действия трехпозиционного регулятора: а - схематическая форма; б - графическая
Введение зоны нечувствительности особенно важно при реализации двух противоположно направленных управляющих воздействий, например, нагрева и охлаждения. При отсутствии зоны нечувствительности процесс регулирования будет иметь ярко выраженный автоколебательный характер. Выражения (3.3.2) и (3.3.3) представляют характеристики идеальных позиционных регуляторов. В реальных регуляторах из-за наличия зазоров, сухого трения, гистерезиса и т. п. могут появляться зоны неоднозначности Upпри срабатывании и отпускании регулятора.
В технике автоматизации систем кондиционирования и вентиляции двухпозиционные регуляторы в виду простоты и надежности нашли широкое применение при регулировании температуры (термостаты), давления (прессостаты) и других параметров состояния процесса. Двухпозиционные регуляторы используются также в системах автоматической защиты, блокировок и переключения режимов
работы оборудования. В этом случае их функции выполняют датчики-реле.
|
|
|
|
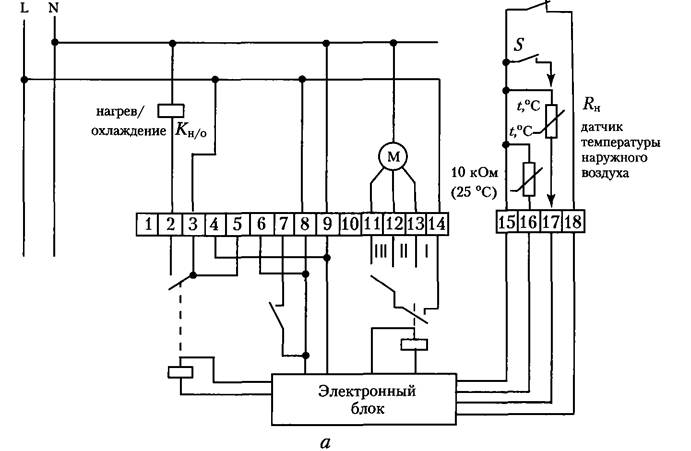
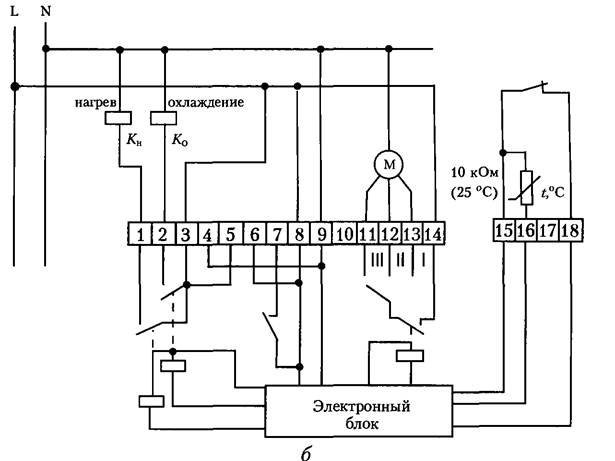
Для примера рассмотрим термостат типа MCR 2000 фирмы GEA для управления двух- и четырехтрубными фэнкойлами (рис. 3.3.3).
Рис. 3.3.3. Схема принципиальная электрическая термостата MCR 2000 для управления фэнкойлами:
а - двухтрубным; б - четырехтрубным
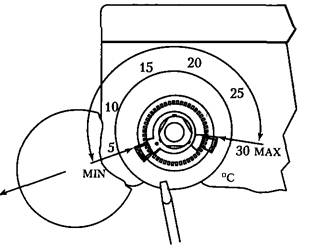
Двухпозиционное регулирование осуществляется в двухтрубных фэнкойлах с помощью электромагнитного клапана Кн/0. Выбор режима нагрев/охлаждение может производиться ручным способом (переключатель 5) или с помощью датчика температуры наружного воздуха RH. Трехпозиционное регулирование для четырехтрубного фэнкойла осуществляется клапанами Кп и К0. Кроме того, термостат позволяет пользователю выбрать одну из трех скоростей вентилятора фэнкойла. Конструктивно термостат выполнен в пластмассовом корпусе, на передней панели которого размещены органы управления: задатчик температуры, выключатель термостата и переключатель скоростей вентилятора. Диапазон задатчика 5-30 °С может быть изменен с помощью ограничителей, расположенных под рукояткой задатчика (рис. 3.3.4).
Внутри корпуса расположен электронный блок, на котором установлены два переключателя (джам-пера) и потенциометр настройки зоны нечувствительности (рис. 3.3.5). Джампер JP1 - наличие датчика наружного воздуха, джампер JP2 -выбор типа фэнкойла: двух- или четырехтрубный. Зона нечувствительности может быть выбрана в диа-
Рис. 3.3.4. Механизм изменение пгз0Пе ОТ ±0,3 К ДО ±3 К.
диапазона задатчика термостата MCR 2000
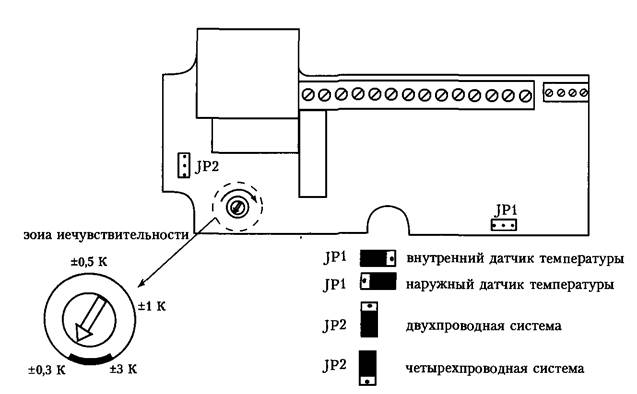
Рис. 3.3.5. Электронный блок термостата MCR 2000
ИМПУЛЬСНЫЕ РЕГУЛЯТОРЫ
Повышение качества регулирования позиционных регуляторов может быть достигнуто путем преобразования величины выходного сигнала Upв длительность выходных импульсов относительно периода их следования:
 (3.3.4)
(3.3.4)
где Ги - длительность управляющего импульса;
Тк - период следования импульса (период квантования).
То есть максимальные Upmax (или минимальные Upmm) значения напряжения на выходе позиционного регулятора формируются не в течение всего времени наличия рассогласования e(t) регулируемого параметра, а периодически. Это позволяет с известной степенью точности реализовать любой закон регулирования, если длительность управляющего импульса будет пропорциональна комбинации П, И и Д-составляющих. Достигается это с помощью широтно-им-пульсной модуляции (ШИМ-ре-гуляторов). Смысл широтно-им-пульсной модуляции заключается в преобразовании уровня выходного сигнала Upв соответствующую ему длительность выходного сигнала (рис. 3.3.6).
При П-законе регулятор выдает импульсы, в которых присутствует только пропорциональная составляющая величины отклонения регулируемого параметра (рис. 3.3.7, а). При реализации ПИ-закона ШИМ-регулятор с появлением e(t)
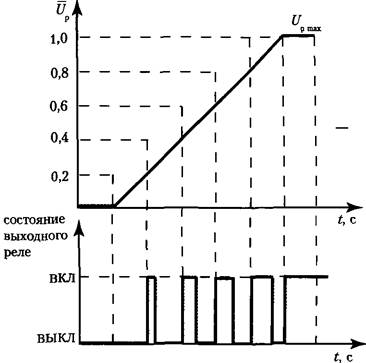
3.6. Принцип широтно-импульсной модуляции (ШИМ)
выдает импульсы, длительность которых постепенно увеличивается. В каждом импульсе присутствует как пропорциональная составляющая (не заштрихованная часть импульса), так и интегральная (заштрихованная часть), которая зависит от Ти (рис. 3.3.7, б).
При управлении исполнительным механизмом трехходового клапана или заслонки необходимо две пары контактов. При подаче управляющих импульсов на первую пару контактов механизм перемещается в одну сторону, например, открывается, при подаче импульсов на вторую пару - закрывается.
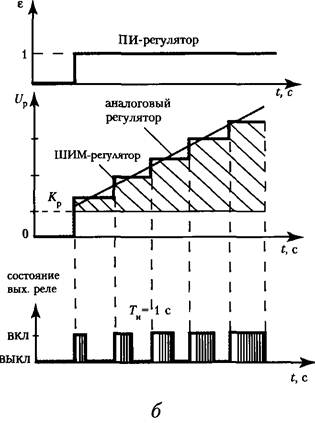
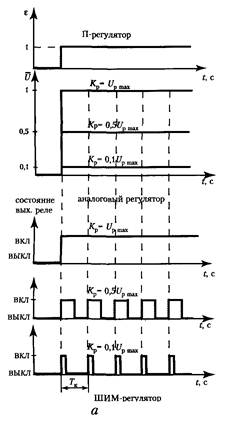
Рис. 3.3.7. Реализация законов регулирования с помощью ШИМ-регуляторов:
а - П-регулятор; б - ПИ-регулятор
Если исполнительный механизм имеет датчик положения, то регулятор вычисляет выходной сигнал Upи перемещает задвижку в нужное положение (до совпадения Upс сигналом датчика положения). Такие регуляторы иногда еще называют позиционерами.
Если датчик положения отсутствует, то регулятор вычисляет среднюю скорость перемещения задвижки Уср, которую затем преобразует в относительную длительность импульса Ги. В этом случае реализуется только ПИ-закон регулирования.
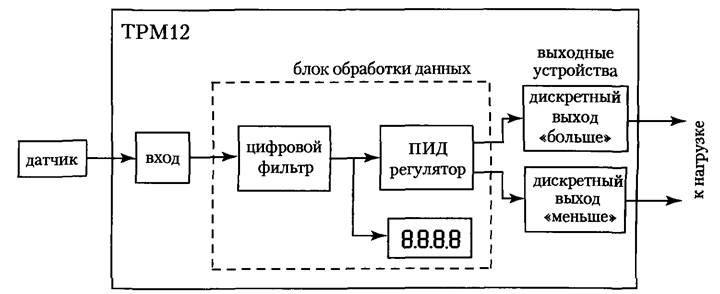
Классическим примером импульсного регулятора является регулятор ТРМ 12 (Россия). ТРМ 12 - одноканальный трехпозиционный ПИД-регулятор, имеющий один вход для подключения датчика и два выхода на исполнительные устройства (рис. 3.3.8). Тип подключаемого датчика (термосопротивление, термопара) и выходных устройств (реле, оптотранзистор, оптосимистор) определяются при заказе. Регулятор может работать в двух режимах: как ПИ-регулятор при управлении задвижками или трехходовыми клапанами без учета их исполнения или как ПИД-регулятор, при управлении системой «нагрев-охлаждение».
Элементы индикации и управления регулятора ТРМ 12 показаны на рис. 3.3.9.
|
|
Рис. 3.3.8. Функциональная схема регулятора ТРМ 12
Аналогичный принцип импульсного управления использован и в регуляторах температуры фирмы REGIN, предназначенных для поддержания заданной температуры с помощью изменения мощности электрических нагревателей. Регулирование мощности происходит за счет изменения времени включения и выключения полной мощности нагревателя. Переключение нагрузки осуществляется с помощью симисторов в тот момент, когда ток и напряжение на нагревателе равны нулю. Это уменьшает потребление электроэнергии, исключает возникновение электромагнитных помех и увеличивает время безотказной работы.
1.9. Органы управления и индикации регулятора ТРМ 12
Регуляторы автоматически изменяют закон управления в зависимости от динамических свойств объекта. При быстро изменяющейся температуре (например, при регулировании температуры приточного воздуха) регуляторы работают в режиме ПИ-регулирования с фиксированной зоной пропорциональности 20 К и временем интегрирования равным 6 мин. При медленно изменяющейся температуре (например, при регулировании температуры в помещении) они работают в режиме П-регулирования с фиксированной зоной пропорциональности 2 К.
В случае повышения потребляемой мощности нагревателя свыше допустимой величины нагрузку можно разделить на несколько ступеней. Для этого имеются вспомогательные блоки ТТ SLAV, которые управляют дополнительными ступенями в позиционном режиме ВКЛ/ВЫКЛ. Технические характеристики регуляторов температуры для управления нагревателями фирмы REGIN приведены в табл. 3.3.1, а конструктивное исполнение показаны на рис. 3.3.10.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.