ИЗУЧЕНИЕ КОНСТРУКЦИИ И ИССЛВДОВА1Щ РАБОТЫ РЕГУЛЯТОРА Р-27 В СИСТЕМЕ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ УРОВНЯ
План выполнения работы
1. Зарисовать схему автоматического регулирования уровня воды в баке со свободным сливом воды.
2. Зарисовать принципиальную электрическую схему блока Р-27, ознакомиться с принципом работы и назначением его модулей
3. Осуществить статическую настройку регулирующего блока Р-27.
4. Осуществить динамическую настройку регулирующего блока Р-27 с учетом динамических свойств объекта регулирования.
5. Включить регулятор в автоматический режим работы и проанализировать процесс регулирования,
Описание экспериментального стенда.
Изучение работы регулятора Р-27 проводится на экспериментальном стенде, схема которого представлена на рис. I. На стенде смонтирована система автома-
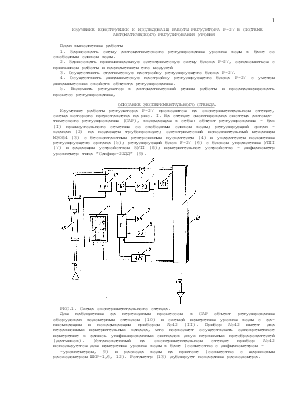
тического регулирования (САР), включающая в себя: объект регулирования - бак (I) прямоугольного сечения со свободным сливом воды; регулирующий орган - клапан (2) на подающем трубопроводе; электрический исполнительный механизм МЭ084 (3) с бесконтактным реверсивным пускателем (4) и указателем положения регулирующего органа (5); регулирующий блок F-27 (6) с блоком управления УПII (7) и задающим устройством ЗУII (8); измерительное устройство - дифманометр уровнемер типа "Сапфир-22ДД" (9).
РИС.1. Схема экспериментального стенда.
Для наблюдения за переходным процессом в САР объект регулирования оборудован водомерным стеклом (10) и схемой измерения уровня воды с за-писывающим и показывающим прибором А542 (II). Прибор А542 имеет два независимых измерительных канала, что позволяет осуществлять одновременное измерение к запись унифицированных сигналов двух первичных преобразователей (датчиков). Установленный на экспериментальном стенде прибор А542 используется для измерения уровня воды в баке (совместно с дифманометром -
-уровнемером, 9) и расхода воды на притоке (совместно с шариковым расходомером ШИР-1,6, 12). Ротаметр (13) дублирует показания расходомера.
ОПРЕДЕЛЕНИЕ ДИНАМИЧЕСКИХ СВОЙСТВ ОБЪЕКТА РЕГУЛИРОВАНИЯ
Понятие о процессе разгона объекта
Некоторые простейшие объекты регулирования, например, бак постоянного поперечного сечения со свободным сливом при регулировании в нем уровня, представляют из себя апериодическое звено первого порядка.
Уравнение этого звена имеет вид
 (1)
(1)
где Т и k — постоянная времени и коэффициент усиления звена,
у — выходная величина, х — входная величина.
Величины Т и k для реальных объектов могут быть определены экспериментально. Для этого снимается разгонная или импульсная характеристика объекта. Разгонная характеристика звена представляет собой изменение во времени выходной величины его после однократного и мгновенного изменения входной. Она может быть получена аналитически в результате решения уравнения (1) при х = const и начальном условии
τ=0, у=0
Разгонная характеристика апериодического звена имеет вид
Краткое описание экспериментальной установки
Проведение опытов и обработка полученных результатов
Для снятия характеристики регулирующего клапана на притоке 1 выливают воду из бака 4, и открывая кран 9, подают воду в бак постоянного уровня. Затем закрывают клапан 2, открывают клапан 1 и подают воду в бак 4. Измеряют ко
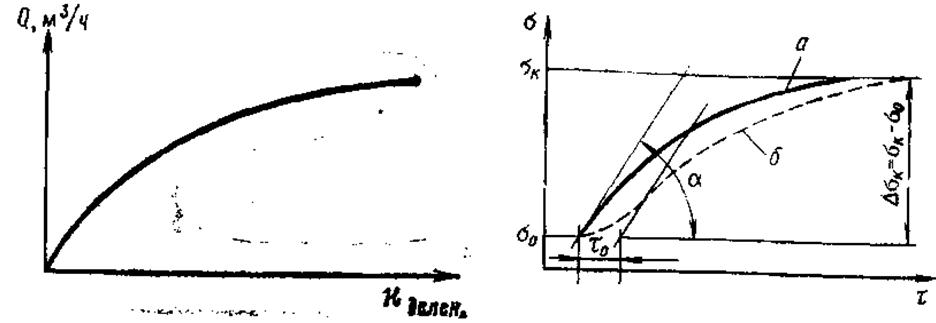
личество поступившей воды в бак 4 за определенное время при различных положениях регулирующего клапана 1. Положение регулирующего клапана определяется цифровой отметкой на шкале. По данным вычисляется объемный расход и строится характеристика регулирующего клапана, которая представляет собой зависимость объемного расхода среды от положения регулирующего клапана. Примерная характеристика регулирующего клапана представлена на рис. 2.
Перед снятием разгонной характеристики в объекте должно быть установлено равновесное состояние при заданном значении уровня. При равновесном состоянии количество воды, подаваемой в бак, равно количеству удаляемой из бака воды. Уровень воды в баке при этом не изменяется. Ориентировочное значение уровня и положение регулирующего клапана на стоке воды из бака задается преподавателем. Изменяя положение регулирующего клапана на притоке добиваются установления в объекте заданного уровня воды. Величина стока воды из бака определяется по характеристике регулирующего клапана на притоке.
Снятие разгонной характеристики объекта регулирования производится в следующем порядке. После нанесения возмущения на объект, которое осуществляется путем быстрого изменения положения клапана 1, через постоянные интервалы времени измеряется положение уровня воды в баке по водомерному стеклу или измерительному прибору. Величина возмущающего воздействия задается преподавателем в делениях шкалы клапана. Возмущающее воздействие может быть положительным или отрицательным в зависимости от того, увеличивается или уменьшается количество воды, подаваемое в бак 4. Опыт заканчивается после установления постоянного уровня воды в баке. Результаты измерений заносятся в таблицу.
Разгонная характеристика строится следующим образом.
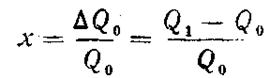
Вычисляются относительные значения регулируемой величины (уровня воды в баке) делением всех измеренных значений на начальное значение уровня. Таким образом, относительное значение регулируемой величины в момент нанесения возмущения равно единице. При увеличении регулируемой величины (положительное возмущение на притоке) все последующие относительные значения будут больше единицы. При отрицательном возмущении на притоке все последующие относительные значения будут меньше единицы. Примерная характеристика разгона приведена на рис. 3.
Для определения постоянных Т и k по построенной разгонной характеристике определяются
у = σ — 1; σ= H/H0, σк= HK/H0
и тангенс угла наклона к разгонной характеристике в момент нанесения возмущения (τ = 0). Последний должен иметь размерность 1/с. Входная величина представляет из себя относительное изменение притока. Она определяется следующим образом. Известно начальное значение притока Q0, которое определяется из характеристики регулирующего клапана на притоке по положению его в момент нанесения возмущения. Значение Q1 после нанесения возмущения определяется по новому положению регулирующего клапана из его характеристики. Величина
![]()
При τ→∞ у = kx.
Отсюда
![]()
Общая характеристика регулирующего аналогового блока Р27, его устройство и работа
Блок регулирующий аналоговый с импульсным выходным сигналом типа Р27 предназначен для применения в схемах автоматического регулирования технологических параметров в различных отраслях промышленности.
Блок выполняет следующие функции:
- суммирование унифицированных входных сигналов постоянного тока;
- введение информации о заданном значении регулируемой величины, формирование и усиление сигнала отключения регулируемой величины от заданного значения;
- формирование выходного импульсного сигнала для воздействия на управляемый процесс в соответствии с одним из следующих законов регулирования: пропорциональный (П) совместно с датчиком положения исполнительного механизма; пропорционально-интегральный (ПИ) совместно с исполнительным механизмом; пропорционально-интегрально-дифференциальный (ПИД) совместно с исполнительным механизмом.
Электрическая принципиальная схема блока Р27 приведена на рис. 2. Блок содержит модуль регулирующий типа P027.I, источник питания КПС01.1 и модуль измерительный ИОО1.1.
Измерительный модуль (ИОО1.1) осуществляет суммирование и масштабирование девяти унифицированных входных сигналов, введение информации о заданном значении регулируемой величины формирование и усиление сигнала отклонения (ε) регулируемой величины от заданного значения.
Модуль содержит следующие функциональные узлы:
Модуляторы I, 2, 3 преобразуют унифицированные сигналы постоянного тока 0 - плюс 5 мА (соответственно сигналы X1, Х2, Х3) в сигналы переменного тока. Сигналы Х2 и Х3 при этом умножаются на масштабные коэффициенты α2 и α3;
Усилитель модулятор 4 суммирует сигналы постоянного тока X41 (0-плюс 5 мА); Х42(4-20 мА); Х43(0 - 20 мА); Х44 (0 - 10В); х45 (-1 +1 В), преобразует их алгебраическую сумму в сигнал переменного тока и умножает на масштабный коэффициент α4;
Сумматор 5 суммирует сигналы с выходов модуляторов I, 2, 3 и усилителя-модулятора 4, обеспечивает гальваническое разделение всех суммируемых сигналов друг от друга и от выходного сигнала;
Демодулятор-усилитель 6 суммирует сигнал сумматора 5 с сигналами узла задатчика (х5, X6) формируя выходной сигнал измерительного модуля (сигнал отклонения регулируемой величины от заданного значения ε ). При этом сигнал отклонения демодулируется.- преобразуется в сигнал постоянного тока;
Источник опорного напряжения 10 питает узел корректора в внешнее потенциометрическое задащее устройство;
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.