Генератор 7 формирует напряжение переменного тока для коммутации ключей модуляторов и демодулятора, а также напряжение постоянного тока, для питания усилителя-модулятора 4.
Статическая характеристика измерительного модуля И001.1 описывается уравнением

Полярность сигнала отклонения ε "плюс" ("минус"} соответствует направлению действия блока Р27 в сторону увеличения (уменьшения) выходного сигнала.
Модуль регулирующий (P027.II) содержит следующие функциональные узлы:
Демпфер преобразует входной сигнал модуля по апериодическому закону с постоянной времени Тд
Дифференциатор формирует дифференциальную составляющую закона регулирования для входного сигнала модуля. Для этого сигнал с выхода демпфера подается на вход дифференциатора, представляющего собой дифференцирующее звено с постоянной времени ТдФ
Сумматор прямого канала суммирует входные сигналы модуля (ε и дополнитель-ный внешний сигнал, Х02.). Выходной сигнал сумматора прямого канала управляет трехпозиционным тригером с зоной нечувствительности ∆.
Сумматор прямого канала и трехпозиционный триггер охвачены, функциональной отрицательной обратной связью. Наличие отрицательной обратной связи приводит к возникновению режима периодических включений сервопривода.
Формирование режима периодических включений (импульсного режима) поясняется на рис. 3.
При превышении сигналом X1, зоны нечувствительности трехпозиционного триггера ( X1 > ∆ ) произойдет включение триггера (имеющего характеристику релейного элемента), выходной сигнал которого Хрэ усиленный в усилителе мощности включит сервопривод. Одновременно сигнал Хрэ поступит на вход устройства обратной связи (УОС).
Сигнал на выходе УОС изменяется по экспоненте в соответствии с уравнением

Поскольку обратная связь в рассматриваемой схеме отрицательная, нарастающий по экспоненте сигнал ХОС будет вычитаться из входного сигнала Хвх и в момент времени, когда их разность станет меньше зоны нечувствительности обратного хода ∆ - ∆" трехпозиционный триггер закроется ( ХРЭ = 0). Сервопривод остановится. В то же время исчезнет сигнал на входе УОС. Сигнал ХОС начнет уменьшаться по экспоненте, а разность Х1 = К(ХРЭ - ХОС ) возрастать и в момент, когда Х1 вновь превысит зону нечувствительности прямого хода X1 > ∆, произойдет повторное включение триггера. Одновременно начнет перемещаться сервопривод регулятора. Описанный цикл будет повторяться до тех пор, пока на входе модуля будет оставаться сигнал разбаланса ε.
ПИД - закон регулирования формируется при предварительном преобразовании входного сигнала (ε) в дифференциаторе.
Передаточные функции модуля совместно с интегрирующим исполнительным механизмом описываются уравнениями: при ПИ-законе регулирования

при ПИД-законе регулирования

где αП - коэффициент передачи УОС;
Тs - время полного хода исполнительного механизма;
ТИ- постоянная интегрирования;
TДФ - постоянная времени дифференцирования.
В регулирующем модуле предусматривается отключение дифференциатора и интегратора. В ‘том случае реализуется трехпозиционный и двухпозиционный закон регулирования. При охвате регулятора жесткой отрицательной обратной связью с выхода датчика положения исполнительного механизма реализуется П-закон регулирования.
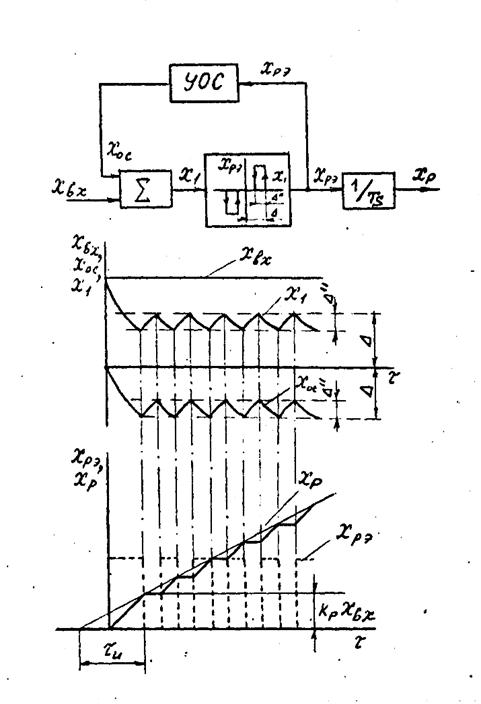
Рис.З. Формирование импульсного режима работы регулятора
Статическая настройка Р27.
Общие положения.
Статическая настройка регулятора Р27 заключается в выборе масштабных коэффициентов αi, обеспечивающих необходимое соотношение входных сигналов при суммировании их друг с другом, выборе величин сигналов корректора и задающего устройства.
Масштабные коэффициенты αi выбираются из условия совмещения статических характеристик датчиков, подключаемых к регулирующему блоку. Условием совмещения статических характеристик датчиков является равенство

Сигнал корректора служит для балансировки измерительного модуля. Его величина выбирается из условия равенства нулю выходного сигнала (ε) измерительного модуля при равенстве регулируемого параметра заданному значению.
Балансировка измерительного блока корректором осуществляется при среднем положении органа управления внешнего задающего устройства, сигнал которого служит для оперативной перенастройки регулятора на стабилизацию регулируемого параметра при новом его значении.
При статической настройке регулятора выбирается диапазон действия задающего устройства (αзу) и осуществляется проверка правильности подключения источников сигналов к измерительному модулю, которая заключается в проверке выполнения условий: источники входных сигналов (датчики, корректор и задатчик) подключены верно, если удается сбалансировать измерительный модуль сигналами от корректора и задатчика и воздействие регулирующего блока на объект при отклонении регулируемого параметра от заданного значения способствует уменьшению отклонения.
Для регулирующего блока Р27, включенного в систему автоматического регулирования уровня воды в баке, входным сигналом является сигнал от датчика уровня. В качестве последнего в лабораторной установке используется дифференциальный диффманометр Сапфир 22ДД с унифицированным выходным сигналом
постоянного тока 0 - +5 мА. Статическая характеристика датчика уровня, а также необходимые для осуществления настройки регулятора статические характеристики корректора и задатчика студентами находятся экспериментально.
Под статическими характеристиками рассматривать:
а) для датчика уровня - зависимость сигнала на выходе из измерительного модуля от уровня воды в баке при условии, что вое другие входные сигналы измерительного модуля отсутствуют;
б) для задатчика - зависимость выходного сигнала измерительного модуля от положения соответствующего органа регулирования при том же условии (отсутствие всех остальных входных сигналов).
Снятие статических характеристик датчика уровня и задающего устройства осуществляется в следующем порядке:
а) подключить к гнездам измерительного модуля «ε» и «ОТ» вольтметр постоянного тока;
б) установить рукоятку настройки масштабного коэффициента по исследуемому каналу в положение α = 1. Для всех остальных входов измерительного модуля установить значение масштабного коэффициента равным нулю ( αi= 0);
в) для датчика уровня воды в баке при медленном заполнении бака водой записать одновременно значение уровня воды и соответствующее показание вольтметра. Для задатчика записываются положение рукоятки настройки и показания вольтметра.
При получении данных построить графики Uд =f(н), Uзд =f(n). При снятии статических характеристик контролируется знак выходного сигнала измерительного модуля.
Используя полученные статические характеристики осуществить настройку регулирующего блока Р27 на поддержание заданного преподавателем уровня воды в баке.
Динамическая настройка регулирующего блока Р27
Основными параметрами динамической настройки регулятора являются коэффициент передачи ( Кр ), постоянная времени дифференциирования ( Тд ) и постоянная времени интегрирования (Ти ). Выбор этих параметров представляет сложную оптимизационную задачу, точное решение которой возможно путем анализа работы САР с использованием математической модели и ЭВМ. На практике параметры динамической настройки регулятора рассчитывают по приближенным зависимостям (таблица I) о последующим их уточнением на действующей САР.
На действующей САР для улучшения качества процесса регулирования подбирают также дополнительные параметры динамической настройки регулятора - длительность интегральных импульсов ТN , постоянную времени демпфирования Тдф и т.д.
По заданию преподавателя на лабораторном стенде реализуется один из законов регулирования (П, ПИ или ПИД-закон). Для этого с использованием ранее полученных динамических характеристик объекта регулирования, рассчитывают параметры динамической настройки регулирующего блока Р27 и устанавливают их на панели блока соответствующими органами настройки. После включения стенда в работу в режим ручного управления выводят уровень воды в баке на отметку, близкую к заданной. Переключив режим управления с ручного на автоматический наблюдают за работой САР. После наступления установившегося режима наносят возмущающее воздействие изменив положение ручного задающего устройства на несколько делений в любую. сторону. Последтующий за этим переходной процесс в САР записывают с помощью автоматического самопишущего прибора А542. По запи- санной диаграмме изменения уровня воды в баке во время переходного процесса определяют показатели его качества: I) динамическую ошибку регулирования; 2) время регулирования; 3} статическую ошибку; 4) перерегулирование.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.