4. Лабораторная работа № 4
Цель работы: сравнить качество и особенности процессов управления объектами с запаздыванием при управлении от регуляторов различных типов.
4.1. Теоретические сведения
4.1.1. Управление объектами с запаздыванием, малым по сравнению с их другими динамическими характеристиками, можно аппроксимировать малыми постоянными времени непрерывной модели объекта. Большие запаздывания учитывают как задержки в передаче сигнала. В дискретной модели объекта запаздывания учитывают коэффициентом z-d. Объекты с запаздыванием и собственной динамикой имеют следующую передаточную функцию
где d = TЗАПАЗД/ T0 - количество тактов запаздывания (целое число, время запаздывания должно быть кратно такту квантования).
4.1.2. ПИД- регуляторы работают удовлетворительно при небольших запаздываниях. Несколько лучшее качество регулирования обеспечивают ПИ-регуляторы.
При больших запаздываниях ПИД-регуляторы практически не справляются с регулированием.
4.1.3. Дискретные АР(n) или АР(n+1) регуляторы непосредственно учитывают большие запаздывания как z-d и обеспечивают наилучшее качество переходного процесса. Однако, когда запаздывание известно не точно, АР регуляторы ухудшают регулирование.
Синтез АР- регуляторов для объектов с запаздыванием заключается в простом учете этого запаздывания. Передаточная функция АР- регулятора для объекта с запаздыванием отличается дополнительным коэффициентом в знаменателе z-d
 (4.1)
(4.1)
здесь A(z-1) и B(z-1) - полиномы из передаточной функции объекта;
d – запаздывание объекта.
Из соотношения (4.1) следует, что параметры АР- регулятора рассчитываются по известным параметрам объекта и не требуют покоординатного поиска настроек по качеству переходного процесса.
Разработаны также другие типы дискретных регуляторов, реализующих различные принципы учета запаздывания объекта.
4.2. Методические указания
4.2.1. Изучите теоретические сведения, запишите определения и расчетные формулы синтеза дискретных регуляторов для объектов с запаздыванием.
4.2.2. Запустите программу, установите заданный объект регулирования и запишите его передаточную функцию G(s).
|
Вариант объекта |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
№ объекта |
3 |
4 |
5 |
1 |
5 |
2 |
4 |
3 |
1 |
2 |
|
Вариант парам |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
Постоянная Т1 |
20 |
15 |
22 |
15 |
10 |
20 |
12 |
16 |
18 |
24 |
|
Постоянная Т2 |
6 |
5 |
10 |
6 |
6 |
8 |
5 |
9 |
6 |
8 |
|
Пост. Т3 (числ.) |
3 |
2 |
4 |
3 |
2 |
4 |
2 |
3 |
3 |
4 |
|
Коэф. затухания e |
0,3 |
0,4 |
0,2 |
0,4 |
0,2 |
0,3 |
0,5 |
0,4 |
0,3 |
0,5 |
Ориентировочный такт квантования надо выбрать самостоятельно по переходной характеристике объекта, показывающей его собственную (без запаздывания) динамику.
Время запаздывания Tзап можно задавать как длительностью такта Т0 так и количеством тактов d.
4.2.3. Снимите переходную характеристику выбранного объекта, установив запаздывание один такт и время моделирования Tучт немного больше времени установления этой характеристики. Это время останется неизменным для всех процессов данной работы.
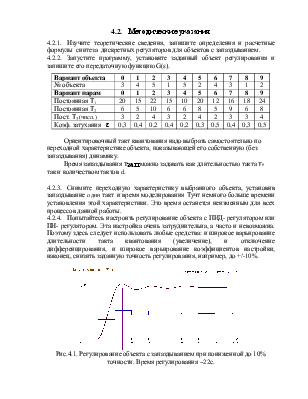
4.2.4. Попытайтесь настроить регулирование объекта с ПИД- регулятором или ПИ- регулятором. Эта настройка очень затруднительна, а часто и невозможна. Поэтому здесь следует использовать любые средства: и широкое варьирование длительности такта квантования (увеличение), и отключение дифференцирования, и широкое варьирование коэффициентов настройки, наконец, снизить заданную точность регулирования, например, до +/-10%.
Рис.4.1. Регулирование объекта с запаздыванием при пониженной до 10% точности. Время регулирования ~22с.
Удачным считается такое регулирование, когда применение регулятора уменьшает время регулирования объекта по сравнению с его работой без регулятора. Управляющий сигнал также должен устанавливаться, т.е. не должно быть его незатухающих колебаний, и должно соблюдаться ограничение по U(0)<10.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.