
Цель работы: целью работы является исследование динамических свойств следящей системы, оценка влияния структуры и параметров системы внешних воздействий на ее точностные характеристики.
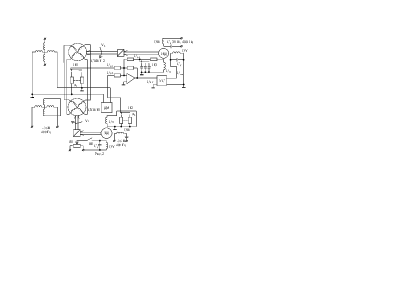
В работе проводится исследование следящей системы, полная структурная
схема которой представлена на рис 1.
Здесь
Wд(p) = kд - передаточная функция электромеханического дискриминатора; Wу(p) = kу- - передаточная функция электронного усилителя;
![]() kдв - передаточная функция исполнительного Wдв(p)=
p(Tмp+1)(Toyp+1) двигателя;
kдв - передаточная функция исполнительного Wдв(p)=
p(Tмp+1)(Toyp+1) двигателя;
Wр(p) = kр -передаточная функция редуктора;
![]() kос p
kос p
Wос(p) = -передаточная функция цепи местной обратной связи;
Tэ p+1
ϕ (p) = kkp - передаточная функция цепи управлений по задающему воздействию;
kм
Wм(p) =−![]() - передаточная
функция исполнительного p(Tм p+1)(Tоу p+1) двигателя по моменту;
- передаточная
функция исполнительного p(Tм p+1)(Tоу p+1) двигателя по моменту;
kд - коэффициент передачи дискриминатора ( крутизна дискриминационной характеристики); kу - коэффициент усиления по напряжению усилителя; kдв - коэффициент передачи исполнительного двигателя; Tм - электромеханическая постоянная времени исполнительного двигателя; Toу - постоянная времени цепи обмотки управления исполнительного двигателя; kр - коэффициент передачи редуктора; kос -коэффициент передачи цепи местной обратной связи Tос - постоянная времени цепи местной обратной связи; kк - коэффициент передачи цепи управления по задающему воздействию; kм - коэффициент передачи двигателя по моменту .
Как следует из структурной схемы, в системе реализован принцип комбинированного управления - управления по отклонению и по задающему воздействию.
Ошибка системы в установившемся режиме:
Vуст = lim pE(p) = lim p[Hеэ(p)θ1(p) +H f (p)M(p)] (1)
p→0 p→0
Здесь
W ( p)
![]() H еэ ( p) = [1 −ϕ(
p) ] 1 +W
( p)
H еэ ( p) = [1 −ϕ(
p) ] 1 +W
( p)
Wд ( p) (2)
- передаточная функция замкнутой системы по ошибке,
![]() Wм(p) W(p)
Wм(p) W(p)
H f (p) = ⋅ (3)
Wy (p)Wдв(p)Wд(p) 1+W(p)
- передаточная функция замкнутой системы по моменту нагрузки,
k(1+Tэ p)
W(p) =![]()
p(TэTоуTдвp3 +(TоуTэ +TэTдв +TоуTдв)p+(Tоу +Tэ +Tдв)p+1+kуkдвkос)
-передаточная функция разомкнутой системы, k = kд kу kдв kр – коэффициент передачи разомкнутой системы (без учета местной обратной связи);
Из выражения (1), что система будет инвариантной по отношению к задающему воздействию V1(t) при Неэ (p).
При этом в соответствии с равенством (2) условие полной инвариантности системы
Wд(p)
ϕ(p)
=![]()
W(p)
или
ϕ(p) =a0 +τ1p+τ22p2 +... (4)
Для систем с астатизмом первого порядка α0 = 0.
В работе реализуется частичная инвариантность по задающему воздействию за счет введения сигнала Uk(t) = τ1dV1 /dt = τ1pV1 .
![]() Этим
устраняется скоростная ошибка системы Vск=Ω/КΩ
что позволяет повысить на единицу порядок астатизма системы [1]. Значение τ1,как следует
из (4), можно определить из выражения kд K
Этим
устраняется скоростная ошибка системы Vск=Ω/КΩ
что позволяет повысить на единицу порядок астатизма системы [1]. Значение τ1,как следует
из (4), можно определить из выражения kд K
τ1 = ,KΩ =
KΩ 1+ kykдвkос
При управление только по отклонению (ϕ (p)=0) передаточная функция
He (p) = ![]()
замкнутой системы по ошибке и установившаяся ошибка системы в режиме неподвижного состояния
(V1(t)=V10=const) в соответствии с (1)
kмkр 0
Vуст = ![]() M
(5)
M
(5)
KΩ
а в режим движение с постоянной скоростью (V1(t)=Ωt)
Ω kмkр 0 (6)
![]() Vуст = + M
Vуст = + M
KΩ KΩ
где M0 - момент нагрузки двигателя,
Использование управления по задающему воздействию не меняет условий устойчивости системы, так как вид характеристического уравнения замкнутой системы D(p)=1+W(p)=0 не зависит от структуры и параметров цепи управления по задающему воздействию ϕ (p).
Получить требуемые динамические свойства системы слежения можно за счет изменения параметров местной отрицательной обратной связи koc,Tэ.
Принципиальная электрическая схема лабораторной установки приведена на рис.2.
Электромеханический дискриминатор реализован на двух синуснокосинусных вращающихся трансформаторах (СКВТ): СКВТ 1 типа ВТ-5 и СКВТ 2 типа 5 ВВТ.
Суммирование сигналов ошибки системы
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.