
Преподаватель Теленков М. В.
Студенты Уткин М.
Коссаковский Ю.
Группа 2092/1
Отчет по лабораторной
работе №3
Численные методы решения обыкновенных
дифференциальных уравнений.
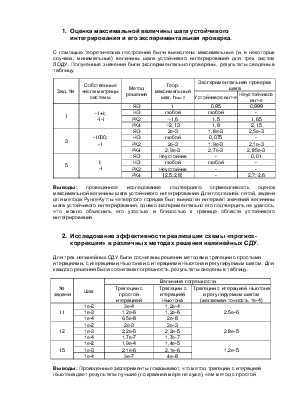
С помощью теоретических построений были вычислены максимальные (и, в некоторых случаях, минимальные) величины шага устойчивого интегрирования для трех систем ЛОДУ. Полученные значения были экспериментально проверены, результаты сведены в таблицу.
|
Зад. № |
Собственные числа матрицы системы |
Метод решения |
Теор. максимальный шаг, hmax T |
Экспериментальная проверка шага |
|
|
Устойчивое инт-е |
Неустойчивое инт-е |
||||
|
1 |
-1+i; -1-i |
ЯЭ |
1 |
0,95 |
0,999 |
|
НЭ |
любой |
любой |
- |
||
|
РК2 |
~1,6 |
1,5 |
1,65 |
||
|
РК4 |
~2,13 |
1,8 |
2,15 |
||
|
3 |
-1000; -1 |
ЯЭ |
2е-3 |
1,8е-3 |
2,5е-3 |
|
НЭ |
любой |
0,075 |
- |
||
|
РК2 |
2е-3 |
1,9е-3 |
2,1е-3 |
||
|
РК4 |
2,9е-3 |
2,7е-3 |
2,85е-3 |
||
|
5 |
i; -i |
ЯЭ |
Неустойчив |
- |
0,01 |
|
НЭ |
любой |
любой |
- |
||
|
РК2 |
Неустойчив |
- |
- |
||
|
РК4 |
[2,5;2,8] |
- |
2,7; 2,6 |
||
Выводы: проведенное исследование подтвердило справедливость оценок максимальной величины шага устойчивого интегрирования. Для последней, пятой, задачи для метода Рунге-Кутты четвертого порядка был вычислен интервал значений величины шага устойчивого интегрирования, однако экспериментально его подтвердить не удалось, что можно объяснить его узостью и близостью к границе области устойчивого интегрирования.
Для трех нелинейных СДУ были сосчитаны решения методами трапеции с простыми итерациями, с итерациями Ньютона и с итерациями Ньютона и регулируемым шагом. Для каждого решения была сосчитана погрешность, результаты сведены в таблицу.
|
№ задачи |
Шаг |
Величина погрешности |
||
|
Трапеции с простой итерацией |
Трапеции с итерацией Ньютона |
Трапеции с итерацией Ньютона и регулируемым шагом (желаемая точность 1е-4) |
||
|
11 |
1е-2 |
3е-4 |
1,2е-4 |
2,5е-6 |
|
1е-3 |
1,2е-6 |
1,2е-6 |
||
|
1е-4 |
6,5е-8 |
2е-8 |
||
|
12 |
1е-2 |
2е-3 |
2е-3 |
2,8е-5 |
|
1е-3 |
2,2е-5 |
2,2е-5 |
||
|
1е-4 |
1,7е-7 |
1,7е-7 |
||
|
15 |
1е-2 |
1,9е-4 |
1,4е-5 |
1,2е-5 |
|
1е-3 |
2,1е-6 |
2,1е-6 |
||
|
1е-4 |
3е-7 |
4е-8 |
||
Выводы: Проведенные эксперименты показывают, что метод трапеции с итерацией Ньютона дает результаты лучшие (по крайней мере не хуже), чем метод с простой итерацией. Метод с регулированием шага при той же точности приводит к решению за меньшее число шагов, о чем свидетельствует значительно меньшее время, затраченное на интегрирование.
В данном эксперименте рассматривается изменение величины полной ошибки в зависимости от порядка метода и величины шага. Исследовались методы Эйлера и Рунге-Кутты 2,3,4 порядков.
Зависимость величины полной ошибки от порядка метода.
|
№ задачи |
шаг |
Величина погрешности |
||||
|
ЯЭ |
НЭС |
РК2 |
РК3 |
РК4 |
||
|
1 |
0,5 |
25 |
17 |
15 |
16 |
0,18 |
|
3 |
0,15 |
0,5 |
0,25 |
0,6 |
0,23 |
0,07 |
Принятые сокращения:
ЯЭ – явный метод Эйлера
НЭС – неявный метод Эйлера для систем линейных уравнений
РК2,3,4 – методы Рунге-Кутты 2, 3, 4 порядка соответственно
Зависимость величины полной ошибки от величины шага.
|
№ задачи |
шаг |
Величина погрешности |
||
|
РК2 |
РК3 |
РК4 |
||
|
1 |
0,1 |
0,35 |
0,01 |
2е-4 |
|
0,5 |
20 |
2,1 |
0,3 |
|
|
0,75 |
17,2 |
7,2 |
1,7 |
|
|
0,95 |
554 |
16 |
4,8 |
|
Выводы: эксперимент показал, что с ростом порядка метода и уменьшением величины шага точность возрастает, однако вместе с тем возрастает и трудоемкость вычислений. Значительный рост погрешности метода РК2 при величине шага 0,95 объясняется приближением величины шага к критическому значению, при котором невозможно устойчиво интегрировать (для этой задачи и этого метода hmax=1).
Целью данного эксперимента является сравнение явных и неявных методов ри интегрировании жестких задач. Сравниваются методы Эйлера, Рунге-Кутты 4,метод Гира второго порядка и метод трапеции.
|
№ задачи |
Шаг |
Величина погрешности |
|||
|
М. Эйлера |
М. РК 4 |
М. Гира |
М. Трапеции |
||
|
3 |
2е-3 |
0,82 |
0,4 |
- |
- |
|
1е-3 |
0,75 |
0,014 |
- |
0,06 |
|
|
5е-4 |
- |
0,018 |
|||
|
1е-4 |
4е-2 |
7е-7 |
9е-4 |
7е-4 |
|
|
5е-5 |
5е-4 |
6,5е-5 |
|||
|
4 |
1e-4 |
- |
- |
2e-10 |
3.6e-10 |
|
1e-3 |
- |
- |
6.6e-1 |
4.7e-11 |
|
Вывод: при интегрировании не слишком жестких задач можно воспользоваться явными методами при условии выбора достаточно малого шага. Если приходится решать очень жесткую систему (такую, как 4), то необходимо воспользоваться неявными жесткоустойчивыми методами, например, методами Гира.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.